
computer_composition1
计算机组成-系列:
1. 计算机发展历程
1.1 硬件的发展
- 第一代计算机:(使用电子管),
- 第二代计算机:(使用晶体管),
- 第三代计算机:(使用较小规模的集成),
- 第四代计算机:(使用较大规模的集成),
1.2 软件的发展
各种软件及操作系统的蓬勃发展
1.3 计算机的分类和发展方向
分为:
- 电子模拟计算机和电子数字计算机。
数字计算机又可以按照用途分为:
- 专用计算机和通用计算机
通用计算机又分为:
- 巨型机、大型机、中型机、小型机、微型机和单片机6类。
按照指令和数据流可以分为:
单指令流和单数据流系统(SISD),即传统的冯·诺依曼体系结构。
单指令流和多数据流系统(SIMD),包括阵列处理器和向量处理器系统。
多指令流和单数据流系统(MISD),这种计算机实际上不存在。
多指令流和多数据流系统(MIMD),包括多处理器和计算机系统。
2. 计算机系统层次结构

2.1 计算机系统的组成
由硬件系统和软件系统共同构建
2.2 计算机硬件的基本组成
- 早期的冯诺依曼机
程序存储原理:指令以代码的形式事先输入到计算机的主存储器中,然后按其在存储器中的首地址执行程序的第一条指令,以后就按该程序的规定顺序执行其他指令,直至程序执行结束。即按地址访问并顺序执行指令
计算机按照此原理应具有5大功能:数据传送功能、数据存储功能、数据处理功能、操作控制功能、操作判断功能
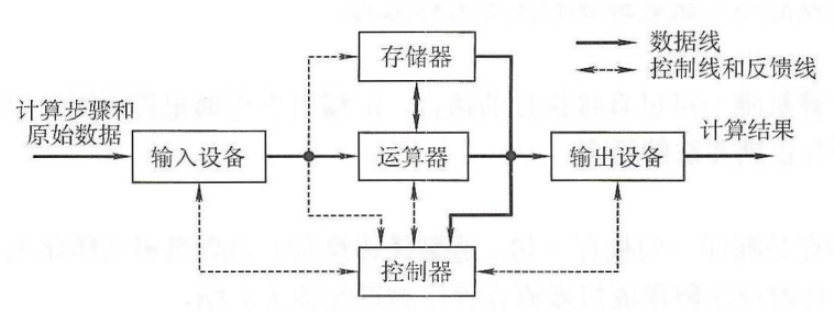
- 冯诺曼体系结构特点:
- 计算机硬件系统由五大部件组成(存储器、运算器、控制器、输出设备、输入设备)
- 指令和数据以同等地位存于存储器,可按地址寻访
- 指令和数据用二进制表示
- 指令由操作码和地址码组成
- 存储程序
- 以运算器为中心
早期的冯·诺依曼机以运算器为中心,且是单处理机,最根本的特征是采用“存储程序”原理,基本工作方式是控制流驱动方式!
- 现代计算机的组织结构
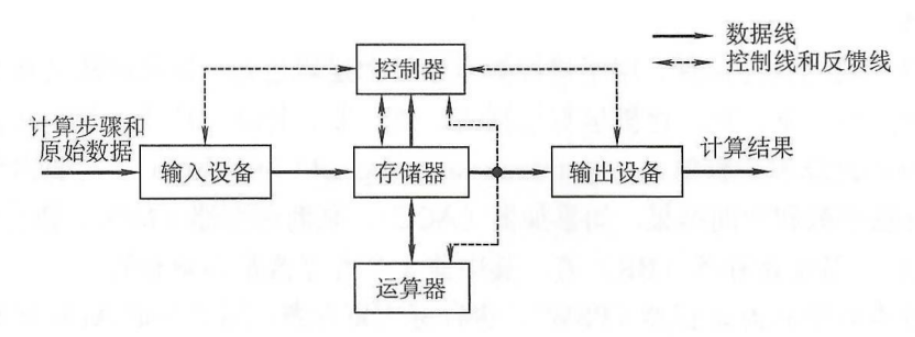
注意各箭头表示的含义
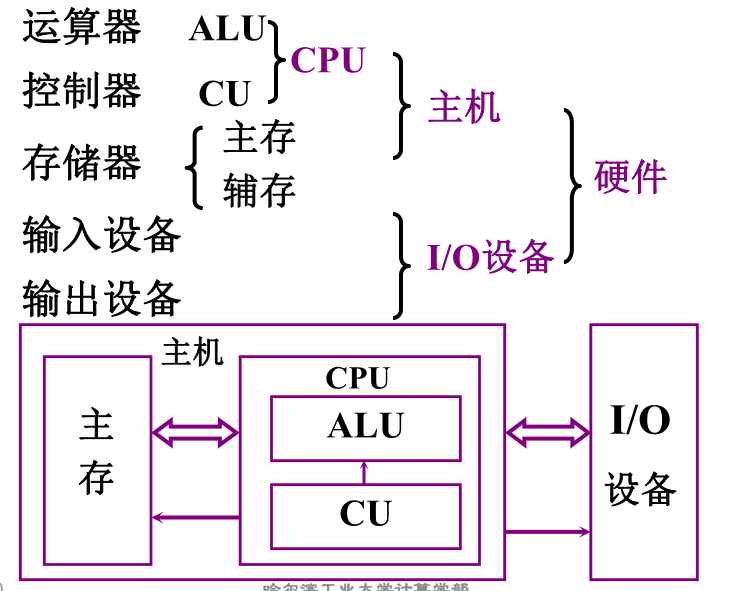
2.3 计算机的功能部件
主机:主存、运算器、控制器
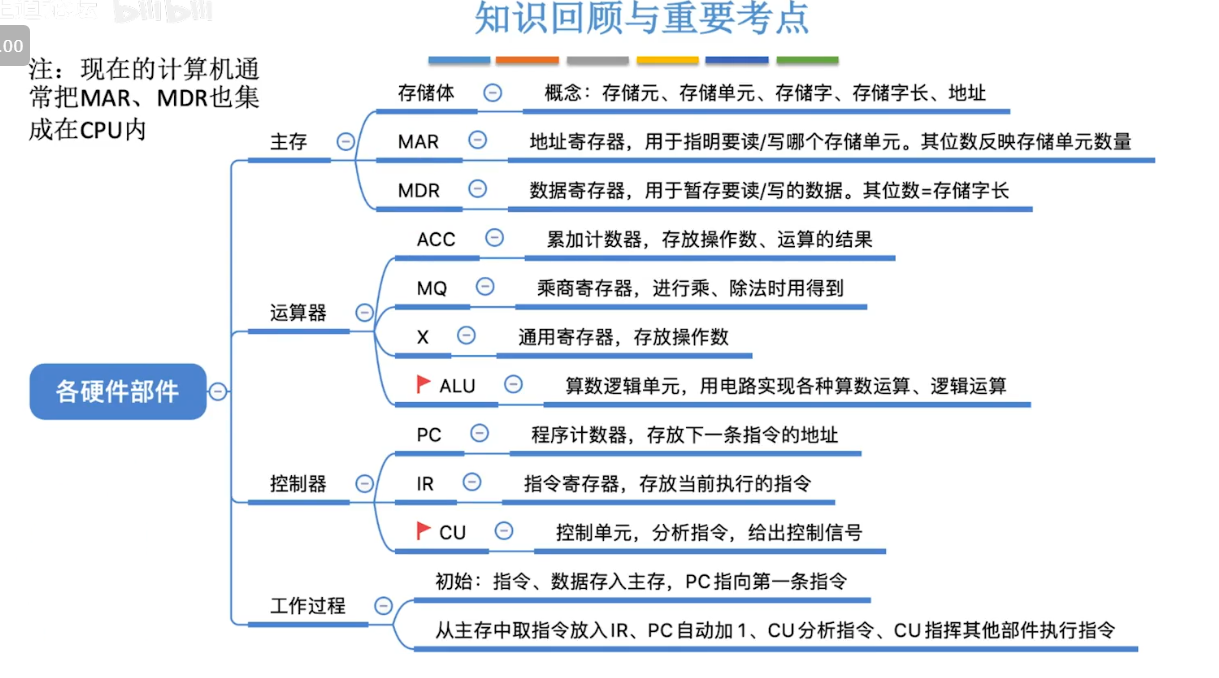
- 存储器的基本组成

设 MAR = 4位 MDR = 8位
则 存储单元16个 每个存储单元存储字长8位
- 运算器的基本组成及操作过程

- 控制器的基本组成

PC指向的是下一次执行的指令,IR指向的是当前要执行的指令
一般将运算器和控制器集成到同一个芯片上,称为中央处理器(CPU)。CPU和主存储器共同构成主机,而除主机外的其他硬件装置(外存、I/O设备等)统称为外部设备,简称外设
- 主机构造和执行指令
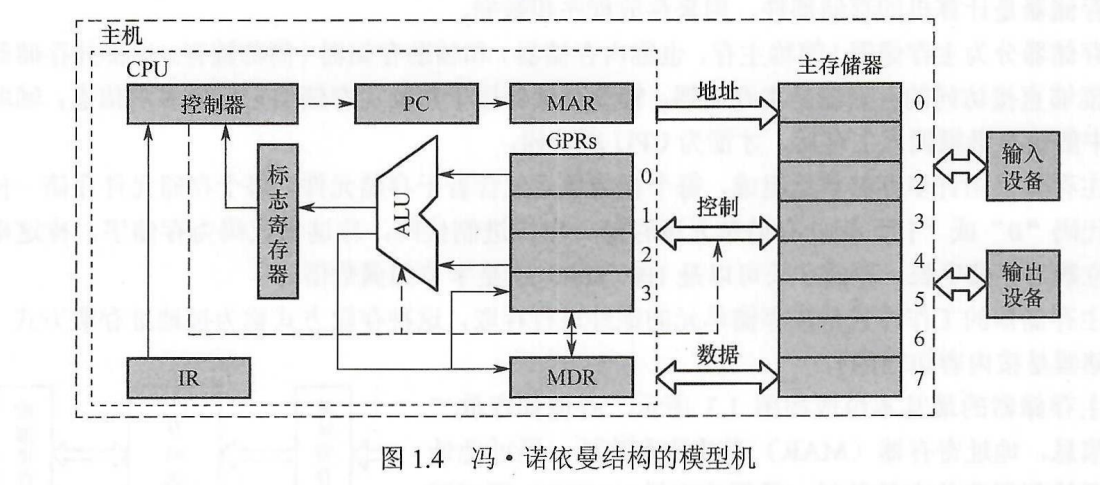
CPU和主存之间通过一组总线相连,总线中有地址、控制和数据3组信号线。MAR中的地址信息会直接送到地址线上,用于指向读/写操作的主存存储单元;控制线中有读/写信号线,指出数据是从CPU写入主存还是从主存读出到CPU,根据是读操作还是写操作来控制将MDR中的数据是直接送到数据线上还是将数据线上的数据接收到MDR中。
主机完成一次指令的过程:
取数操作为例


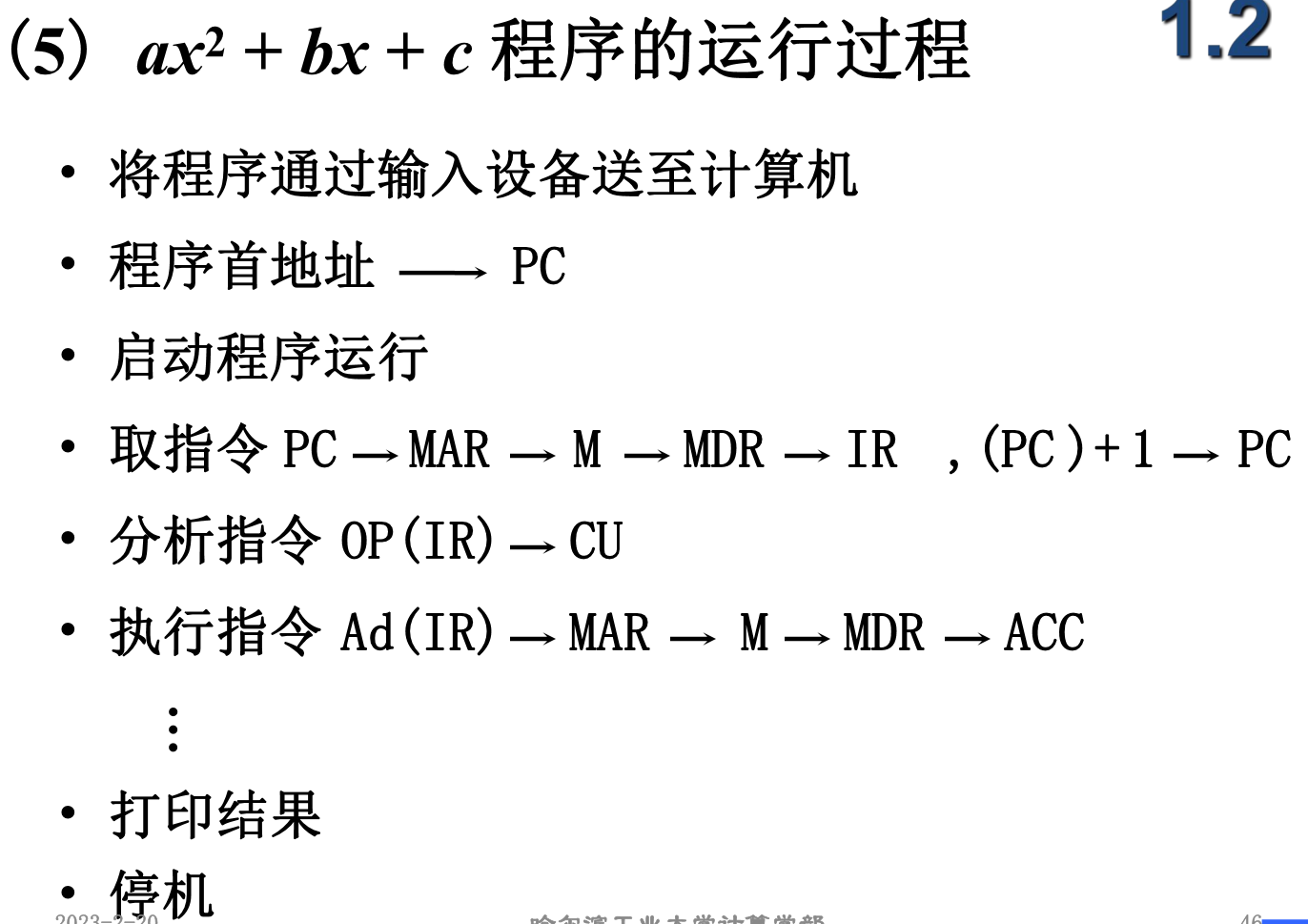
2.4 计算机硬件的性能指标
- 机器字长: cpu 一次能处理数据的位数,与cpu中的 寄存器位数有关,机器字长一般等于内部寄存器的大小,它决定了计算机的运算精度。
机器字长:计算机能直接处理的二进制数据的位数,机器字长一般等于内部寄存器的大小,它决定了计算机的运算精度。
指令字长:一个指令字中包含的二进制代码的位数。
存储字长:一个存储单元存储的二进制代码的长度。等于MDR的位数, 它们都必须是字节的整数倍。
数据字长:数据总线一次能传送信息的位数,它可以不等于MDR的位数。
指令字长一般取存储字长的整数倍,若指令字长等于存储字长的2倍,则需要2次访存来取出一条指令,因此取指周期为机器周期的2倍;若指令字长等于存储字长,则取指周期等于机器周期。
早期的计算机存储字长一般和机器的指令字长与数据字长相等,因此访问一次主存便可取出一条指令或一个数据。随着计算机的发展,指令字长可变,数据字长也可变,但它们必须都是字节的整数倍。
请注意64位操作系统是指特别为64位架构的计算机而设计的操作系统,它能够利用64位处理器的优势。但64位机器既可以使用64位操作系统,又可以使用32位操作系统。而32位处理器是无法使用64位操作系统的。
- 运算速度:
主频
吉普森法
$$
T_M = \sum_{i=1}^{n}f_it_i
$$MIPS 每秒执行百万条指令
FLOPS 每秒浮点运算次数
CPI 执行一条指令所需时钟周期数

2.5 计算机软件的分类
- 系统软件和应用软件
- 三个级别的语言
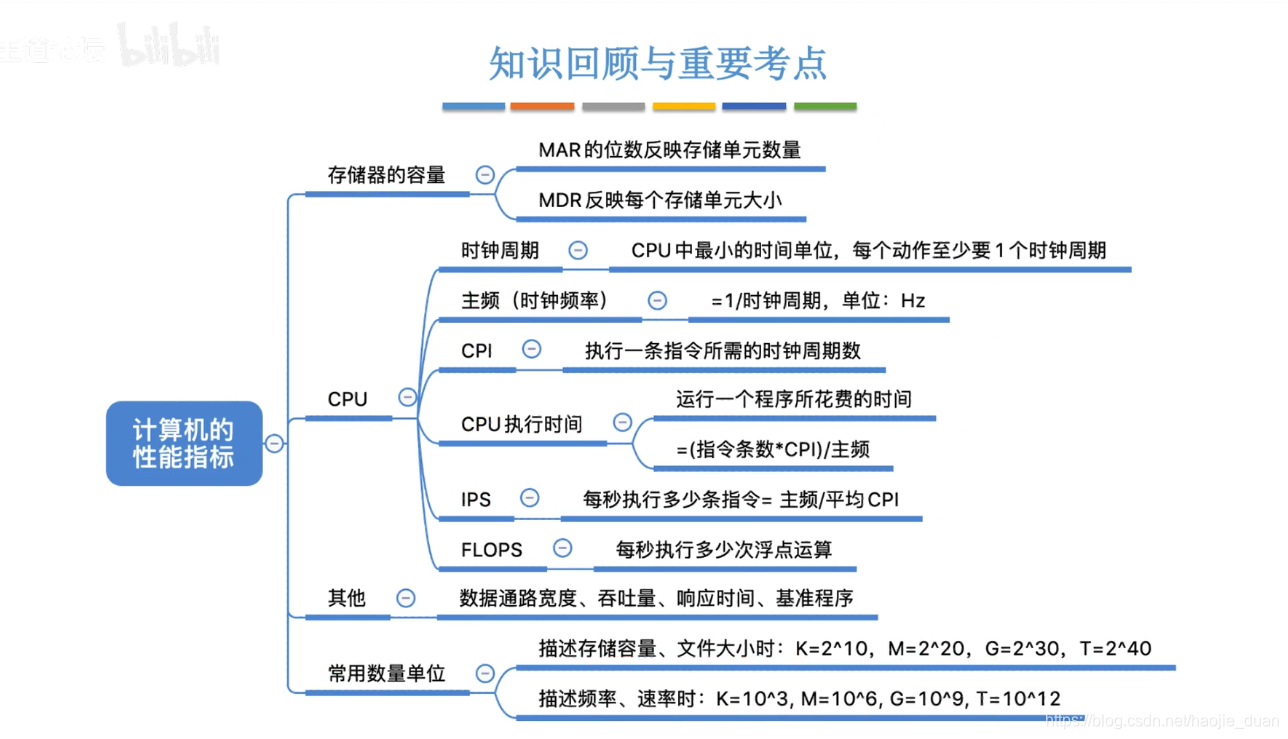
3.数据的表示与运算
3.1数制与编码
1.进位计数值及其相互转化
进制之间的相互转换,乘x除x法
1位16进制数等价于4位二进制数, 一位8进制数等价于3位二进制数
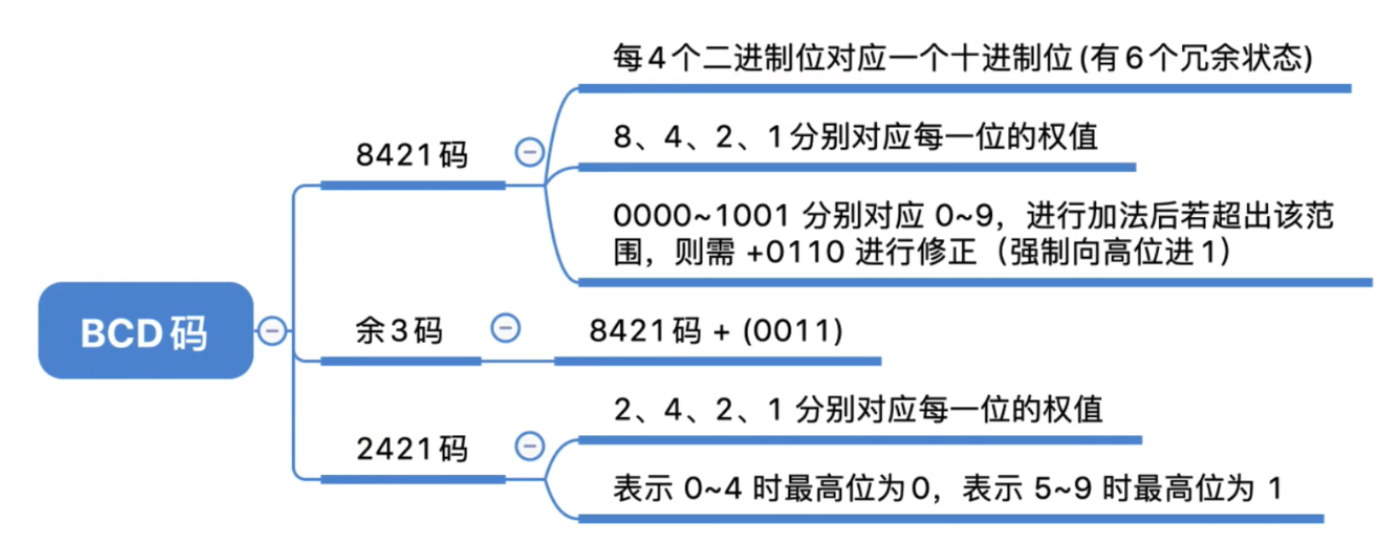
2.BCD码 用二进制数表示十进制
这是为了表示0和9,所以1010~1111都是违法的
3.字符与字符串
英文字符的表示 ASCII码
中文字符的表示 GDB等其他编码
字符串的大小端模式
- 大端模式:将数据的最高有效字节存放在低地址单元中
- 小端模式:将数据的最高有效字节存放在高地址单元中
4.校验码
待补充…
3.2 定点数的表示和运算
定点数和浮点数是一对相对的概念
整数的小数点表示在最后一位数字的后面,而小数的小数点标识在真值的符号位后面
1.定点数的移位规则

- 将+26的原码、补码和反码分别左移一位 结果是:[26]原 = [26]反 = [26]补 = 0,0011010,根据规则,原码、反码、补码左移一位的结果是:0,010100
- 将-26的原码、反码、补码分别左移一位 [-26]原 = 1,0011010,左移一位:1,0110100 [-26]反 = 1,1100101,左移一位:1,1001011 [-26]补 = 1,1100110,左移一位:1,100110
2.定点数的加减法
加法直接加,减法先变为加法后再计算
[A+B]补 = [A+B]补,[A-B]补 = [A]补 + [-B]补
- A = -1001,B = -0101,求[A+B]补 [A+B]补 = [A]补 + [B]补,[A]补 = 1,0111,[B]补 = 1,1011,所以最终的结果是:11,0010,但是这并非我们的最终结果,最终结果应该丢掉第一个1,即1,0010.为什么呢?这涉及到一个模2运算的问题,如果不想深究只需要记住,一个数只能有一个符号位不是吗?
- A = -1001,B=-0101.求[A-B]补 [A-B]补 = [A]补 + [-B]补,[A]补=1,0111,[-B]补=0,0101(求法:**[-B]补等于[B]补符号位和各位取反,末位加一**),这样得到最终的结果,丢弃掉多余的位即可。
溢出的判断:如果计算机的机器字长为4,那么能够表示的真值范围在-8~+7之间,如果两个数相加减,跳出了这个范围,则为溢出
判断原则:
- 不论加法还是减法,只要实际参与运算的两个数的符号相同,但是与最终的结果的符号相反,则为溢出。比如我们的第一个例子,两个参与运算的数的符号相同,且和最终结果的符号也相同,则这种情况就不是溢出。
- 最终结果的两位符号位如果相同,则无溢出,如果不同则溢出,还是第一个例子,计算后的结果是11,0010,两位符号位相同,没有溢出。
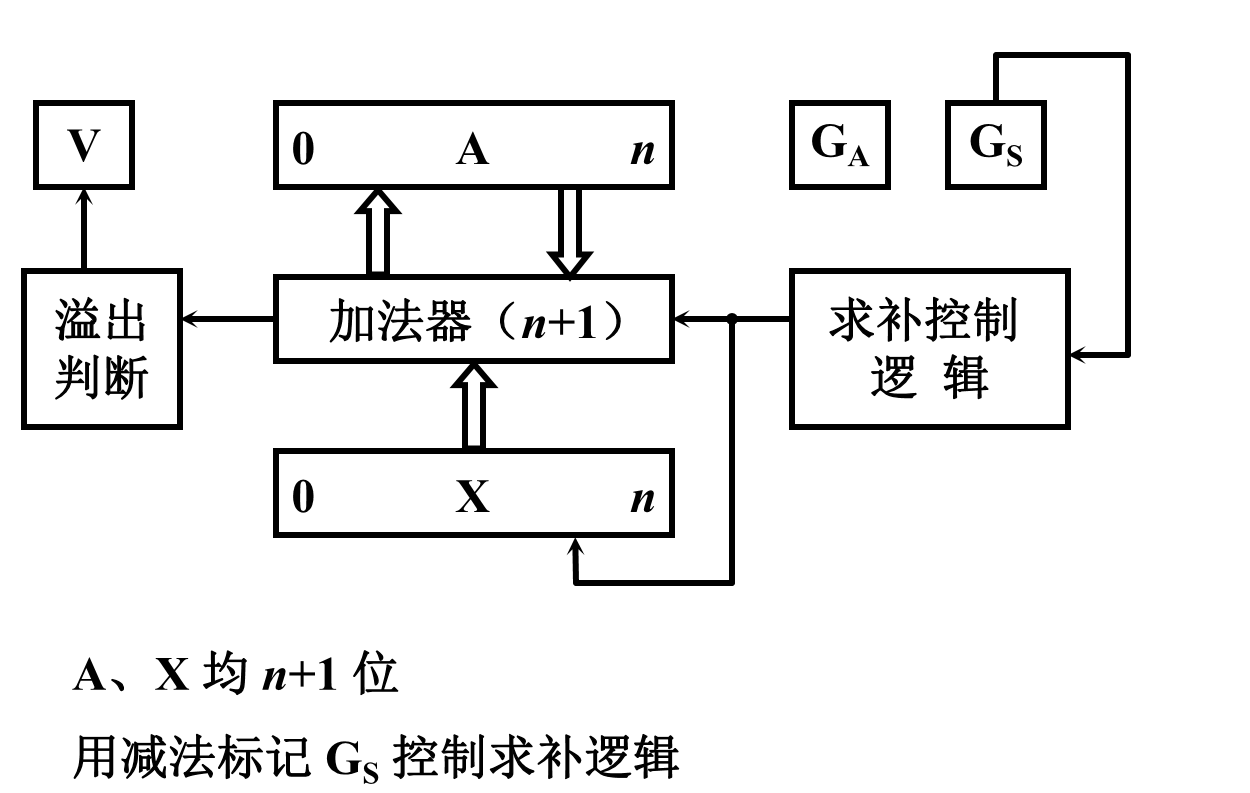
补码加法硬件配置
3.定点数的乘法
- 原码乘法
一位
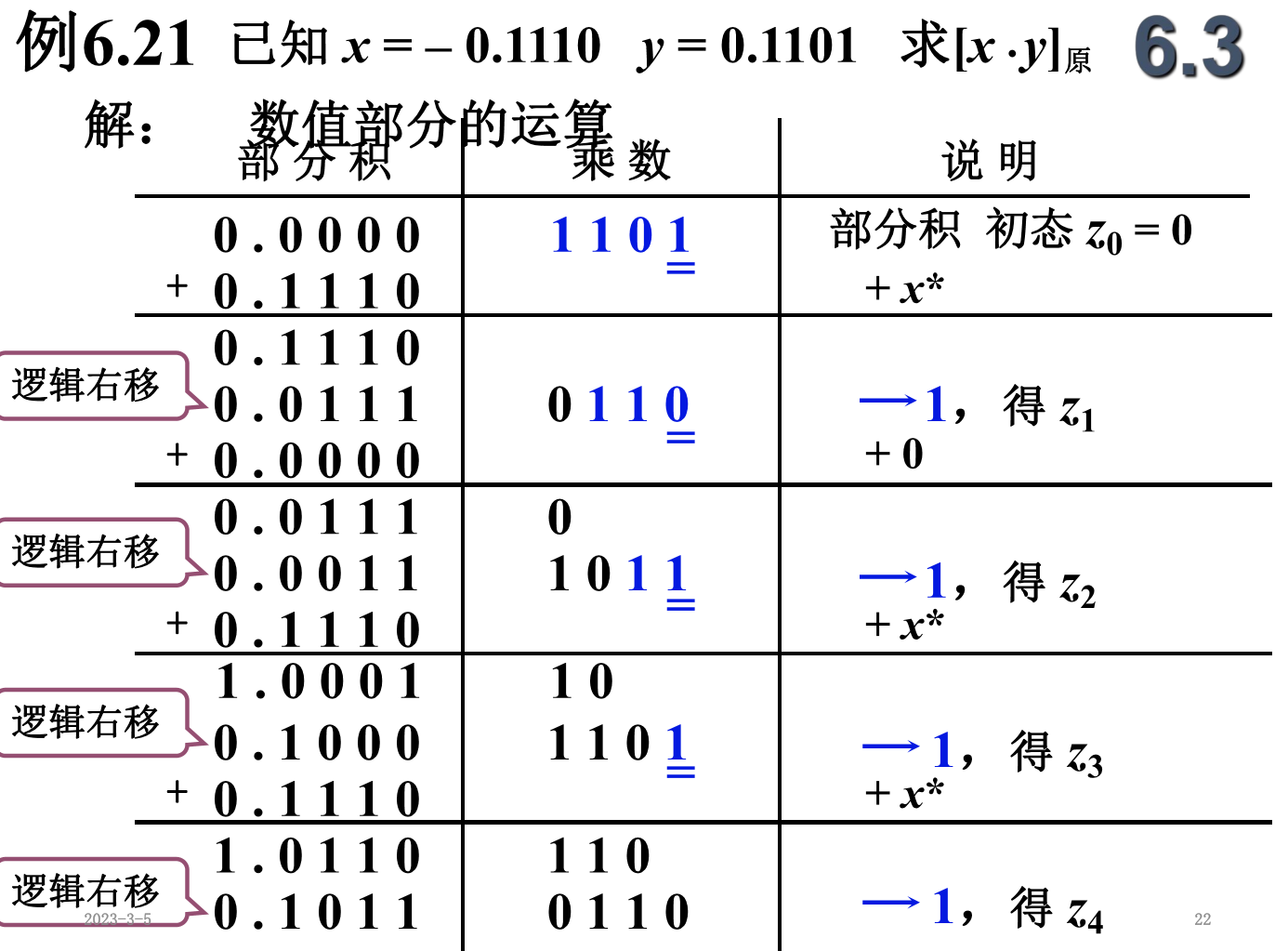
- 绝对值运算
- 用移位的次数判断乘法是否结束
- 逻辑移位
两位

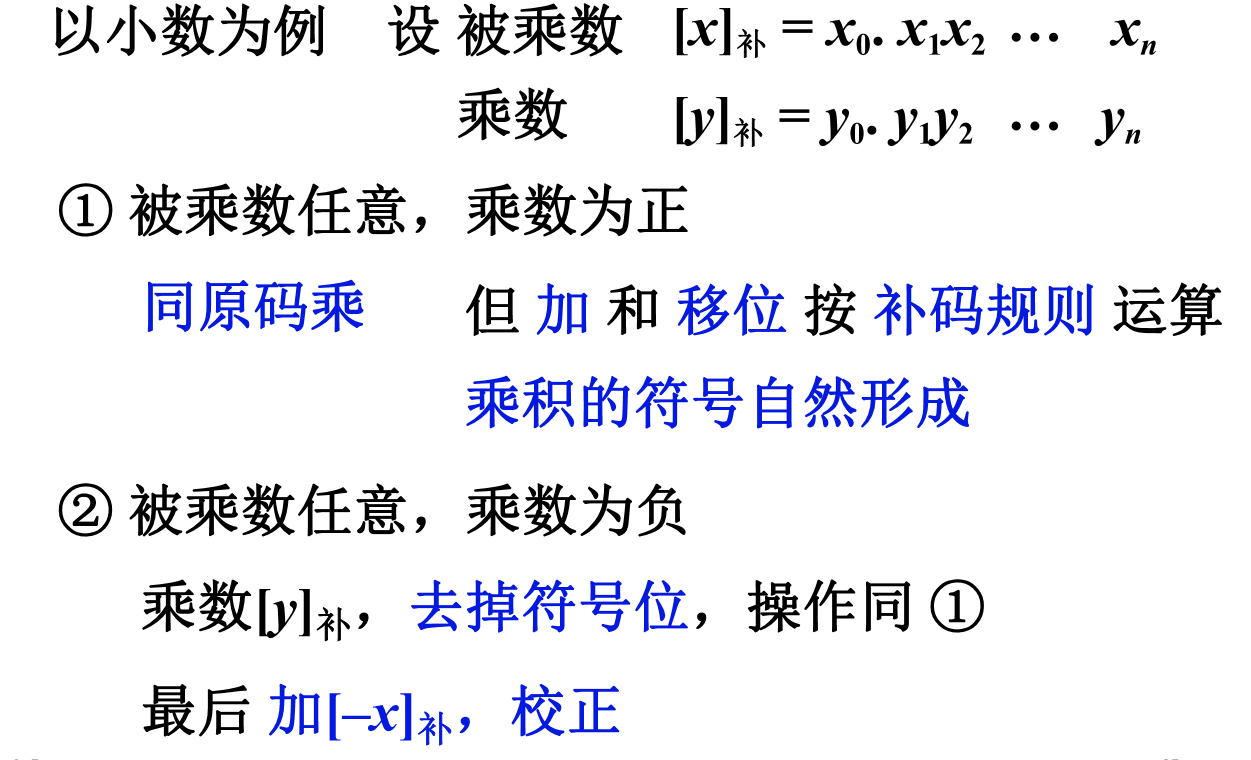
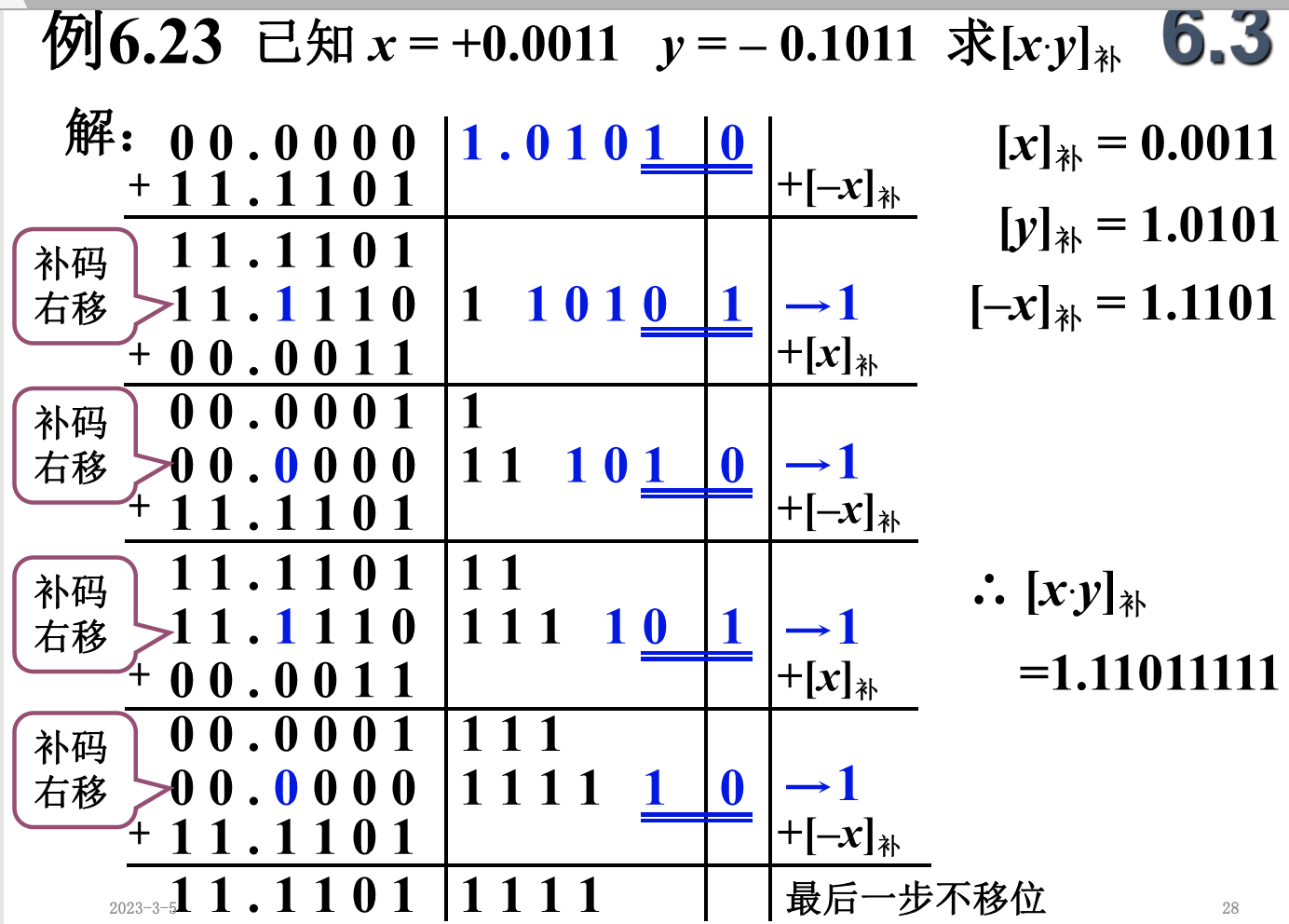
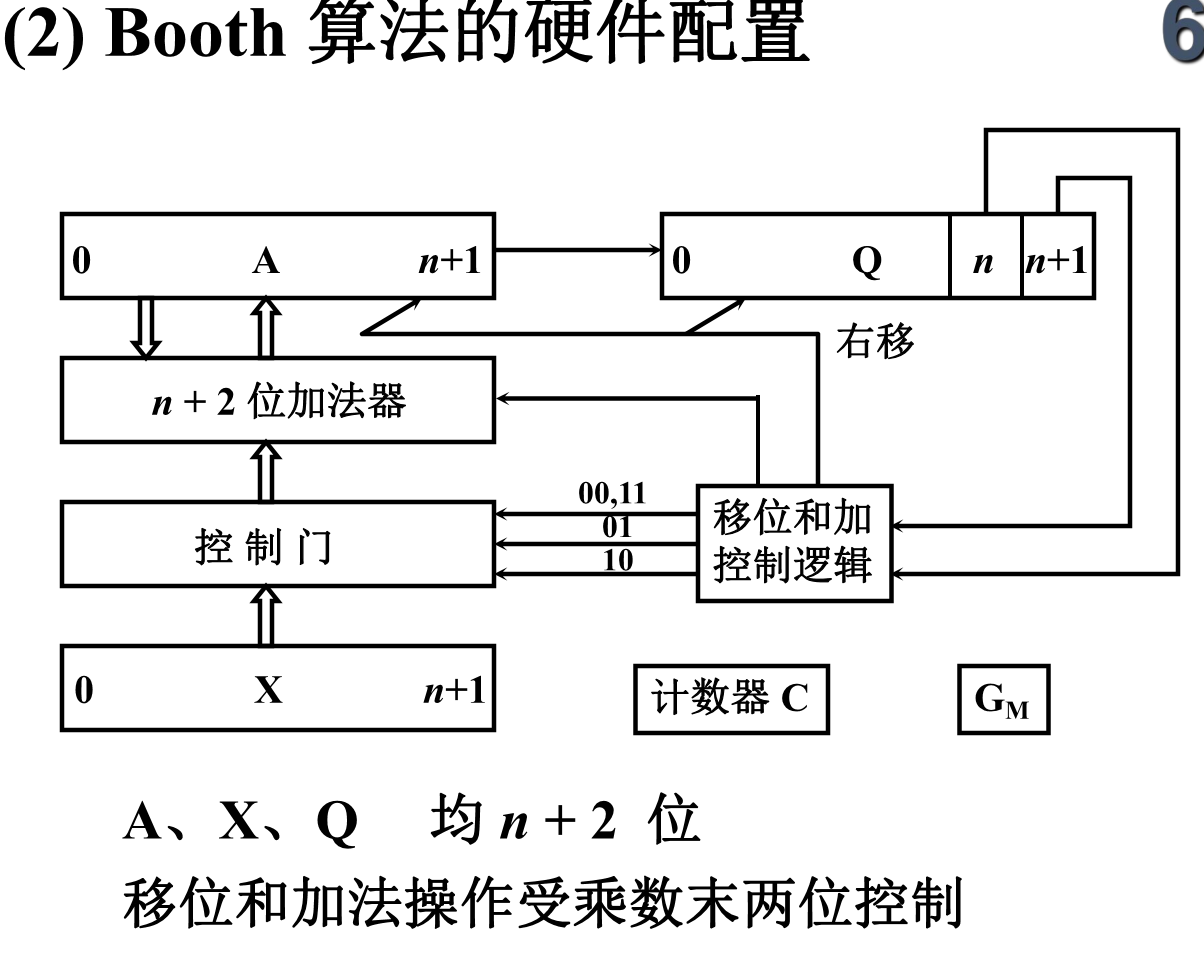
- 补码乘法
4.定点数的除法
- 恢复余数法

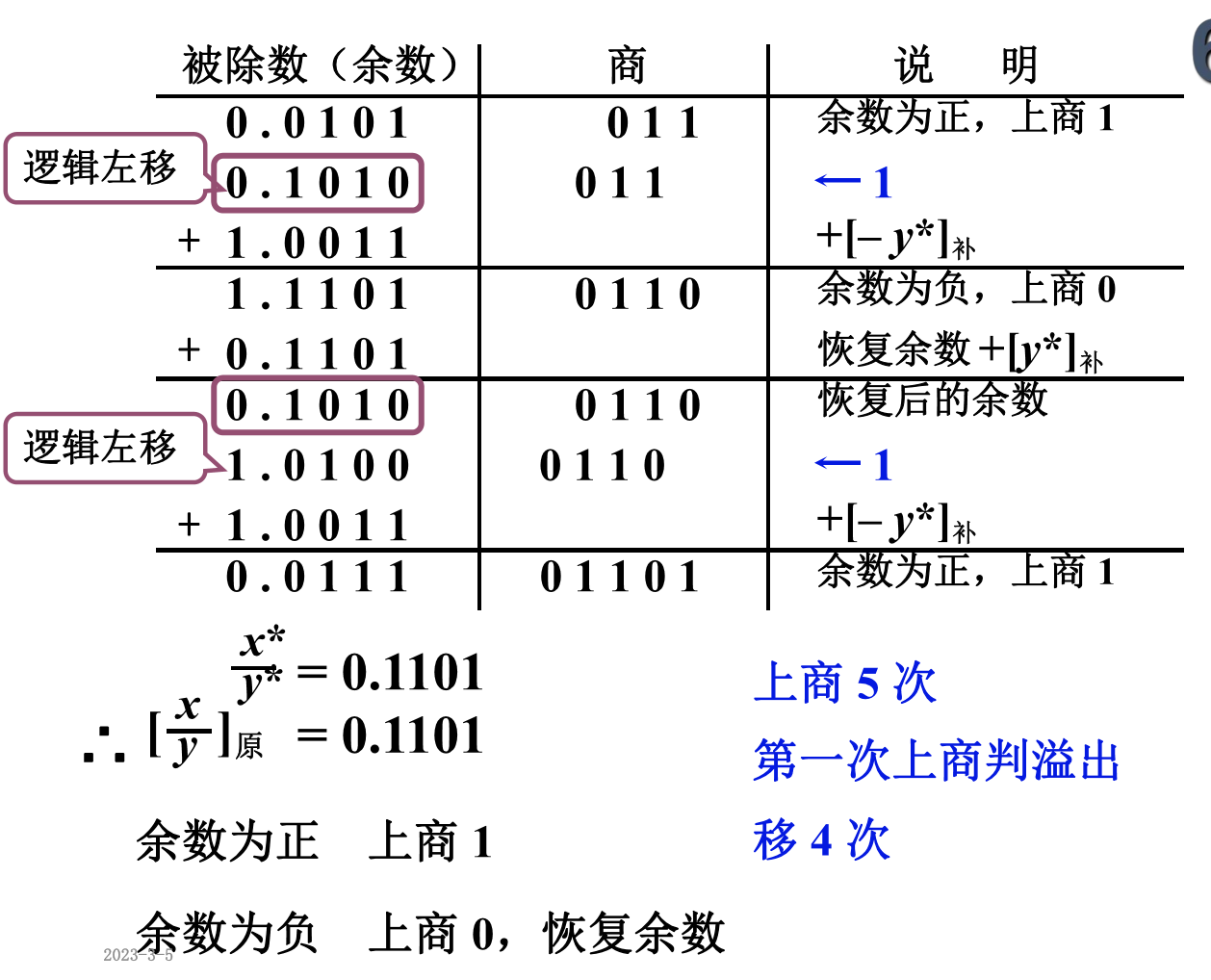
- 不恢复余数法

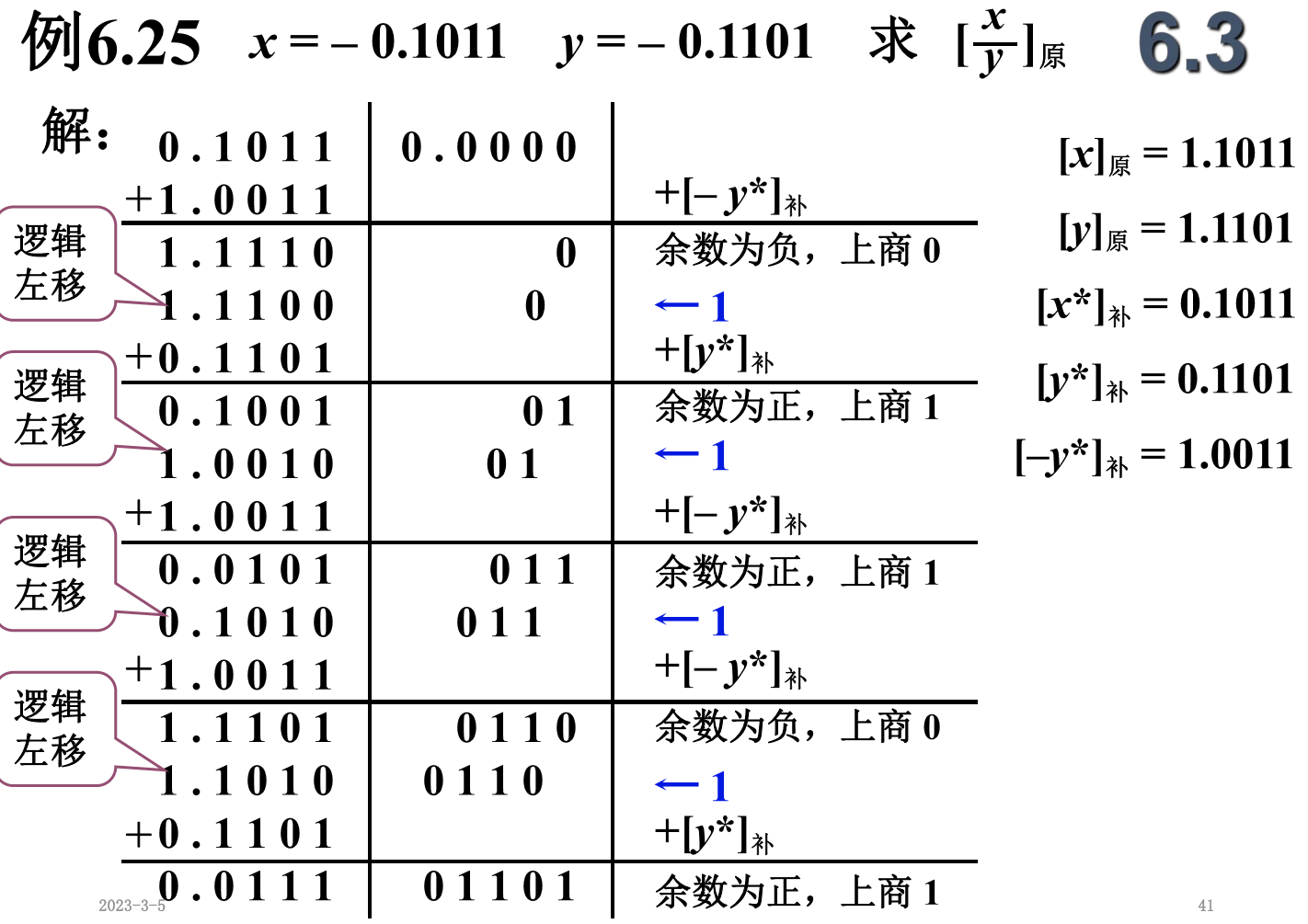
- 上商n+1次
- 第一次上商判溢出
- 移n次,加n+1次
- 用移位的次数判断除法是否结束
3.3 浮点数的表示与运算
用定点数表示数字时,会约定小数点的位置固定不变,整数部分和小数部分分别转换为二进制,就是定点数的结果。
但用定点数表示小数时,存在数值范围、精度范围有限的缺点,所以在计算机中,我们一般使用「浮点数」来表示小数。
其中「定点」指的是约定小数点位置固定不变。那浮点数的「浮点」就是指,其小数点的位置是可以是漂浮不定的。
例如十进制小数 8.345,用科学计数法表示,可以有多种方式:
1 | 8.345 = 8.345 * 10^0 |
用这种科学计数法的方式表示小数时,小数点的位置就变得「漂浮不定」了,这就是相对于定点数,浮点数名字的由来。
使用同样的规则,对于二进制数,我们也可以用科学计数法表示,也就是说把基数 10 换成 2 即可。
浮点数如何表示数字:
1 | V = (-1)^S * M * R^E |
其中各个变量的含义如下:
- S:符号位,取值 0 或 1,决定一个数字的符号,0 表示正,1 表示负
- M:尾数,用小数表示,例如前面所看到的 8.345 * 10^0,8.345 就是尾数
- R:基数,表示十进制数 R 就是 10,表示二进制数 R 就是 2
- E:指数,用整数表示,例如前面看到的 10^-1,-1 即是指数
假设现在我们用 32 bit 表示一个浮点数,把以上变量按照一定规则,填充到这些 bit 上就可以了:

假设我们定义如下规则来填充这些 bit:
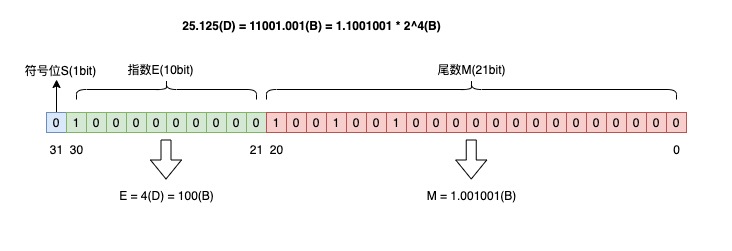
- 符号位 S 占 1 bit
- 指数 E 占 10 bit
- 尾数 M 占 21 bit
按照这个规则,将十进制数 25.125 转换为浮点数,转换过程就是这样的(D代表十进制,B代表二进制):
- 整数部分:25(D) = 11001(B)
- 小数部分:0.125(D) = 0.001(B)
- 用二进制科学计数法表示:25.125(D) = 11001.001(B) = 1.1001001 * 2^4(B)
所以符号位 S = 0,尾数 M = 1.001001(B),指数 E = 4(D) = 100(B)。
按照上面定义的规则,填充到 32 bit 上,就是这样:
上述规则只是随意设置的,若按新规则来,那浮点数表示出来也可以这样:
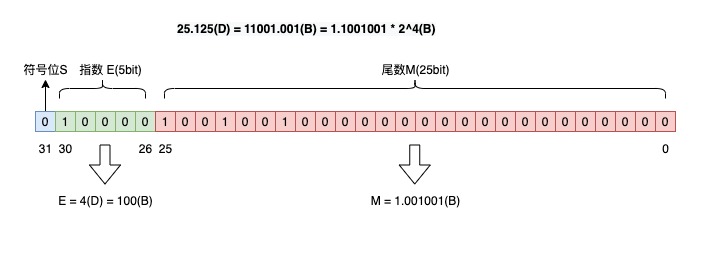
可以看到:
- 指数位越多,尾数位则越少,其表示的范围越大,但精度就会变差,反之,指数位越少,尾数位则越多,表示的范围越小,但精度就会变好
- 一个数字的浮点数格式,会因为定义的规则不同,得到的结果也不同,表示的范围和精度也有差异
早期人们提出浮点数定义时,就是这样的情况,当时有很多计算机厂商,例如IBM、微软等,每个计算机厂商会定义自己的浮点数规则,
浮点数标准
直到1985年,IEEE 组织推出了浮点数标准,就是我们经常听到的 IEEE754 浮点数标准,这个标准统一了浮点数的表示形式,并提供了 2 种浮点格式:
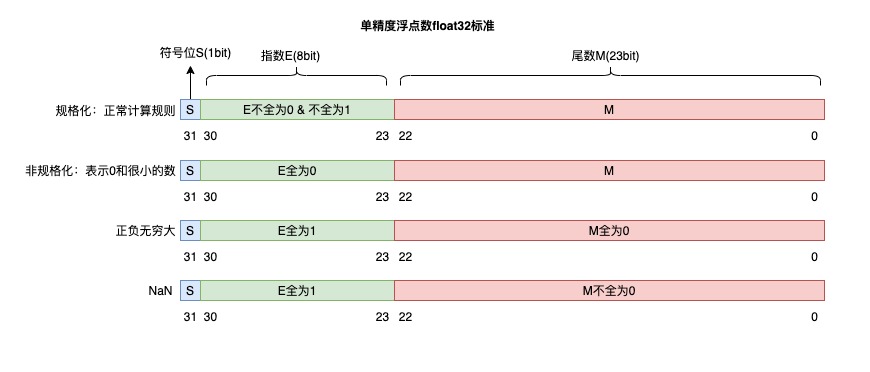
- 单精度浮点数 float:32 位,符号位 S 占 1 bit,指数 E 占 8 bit,尾数 M 占 23 bit
- 双精度浮点数 double:64 位,符号位 S 占 1 bit,指数 E 占 11 bit,尾数 M 占 52 bit
为了使其表示的数字范围、精度最大化,浮点数标准还对指数和尾数进行了规定:
- 尾数 M 的第一位总是 1(因为 1 <= M < 2),因此这个 1 可以省略不写,它是个隐藏位,这样单精度 23 位尾数可以表示了 24 位有效数字,双精度 52 位尾数可以表示 53 位有效数字
- 指数 E 是个无符号整数,表示 float 时,一共占 8 bit,所以它的取值范围为 0 ~ 255。但因为指数可以是负的,所以规定在存入 E 时在它原本的值加上一个中间数 127,这样 E 的取值范围为 -127 ~ 128。表示 double 时,一共占 11 bit,存入 E 时加上中间数 1023,这样取值范围为 -1023 ~ 1024。
除了规定尾数和指数位,还做了以下规定:
- 指数 E 非全 0 且非全 1:规格化数字,按上面的规则正常计算
- 指数 E 全 0,尾数非 0:非规格化数,尾数隐藏位不再是 1,而是 0(M = 0.xxxxx),这样可以表示 0 和很小的数
- 指数 E 全 1,尾数全 0:正无穷大/负无穷大(正负取决于 S 符号位)
- 指数 E 全 1,尾数非 0:NaN(Not a Number)
标准浮点数的表示
有了这个统一的浮点数标准,我们再把 25.125 转换为标准的 float 浮点数:
- 整数部分:25(D) = 11001(B)
- 小数部分:0.125(D) = 0.001(B)
- 用二进制科学计数法表示:25.125(D) = 11001.001(B) = 1.1001001 * 2^4(B)
所以 S = 0,尾数 M = 1.001001 = 001001(去掉1,隐藏位),指数 E = 4 + 127(中间数) = 135(D) = 10000111(B)。填充到 32 bit 中,如下:
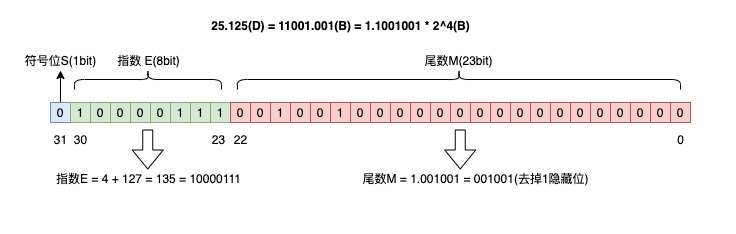
这就是标准 32 位浮点数的结果。
如果用 double 表示,和这个规则类似,指数位 E 用 11 bit 填充,尾数位 M 用 52 bit 填充即可。
注:
float 1位符号位,8位阶码位(移码表示,偏移127,取值范围为1~254,0和255表示特殊值),23位尾数(隐含1),所以能表示的最大正整数为 (1+1-2^-23)* 2^127
double 1位符号位,11位阶码位(偏移 1023),52位尾数位(隐含1),所以能表示的最大正整数为(1+1-2^52)* 2^1023
浮点数的范围和精度
以单精度浮点数 float 为例,它能表示的最大二进制数为 +1.1.11111…1 * 2^127(小数点后23个1),而二进制 1.11111…1 ≈ 2,所以 float 能表示的最大数为 2^128 = 3.4 * 10^38,即 float 的表示范围为:-3.4 * 10^38 ~ 3.4 * 10 ^38。
精度:
float 能表示的最小正二进制数为 0.0000….1(小数点后22个0,1个1),用十进制数表示就是 1/2^23。
用同样的方法可以算出,double 能表示的最大二进制数为 +1.111…111(小数点后52个1) * 2^1023 ≈ 2^1024 = 1.79 * 10^308,所以 double 能表示范围为:-1.79 * 10^308 ~ +1.79 * 10^308。
double 的最小精度为:0.0000…1(51个0,1个1),用十进制表示就是 1/2^52。
虽然浮点数的范围和精度也有限,但其范围和精度都已非常之大

总结
- 浮点数一般用科学计数法表示
- 把科学计数法中的变量,填充到固定 bit 中,即是浮点数的结果
- 在浮点数提出的早期,各个计算机厂商各自制定自己的浮点数规则,导致不同厂商对于同一个数字的浮点数表示各不相同,在计算时还需要先进行转换才能进行计算
- 后来 IEEE 组织提出了浮点数的标准,统一了浮点数的格式,并规定了单精度浮点数 float 和双精度浮点数 double,从此以后各个计算机厂商统一了浮点数的格式,一直延续至今
- 浮点数在表示小数时,由于十进制小数在转换为二进制时,存在无法精确转换的情况,而在固定 bit 的计算机中存储时会被截断,所以浮点数表示小数可能存在精度损失
- 浮点数在表示一个数字时,其范围和精度非常大,所以我们平时使用的小数,在计算机中通常用浮点数来存储
补充: 负数补码表示范围以及规格化数
3.4 算数逻辑单元(ALU)
1.ALU电路

ALU电路是一个组合逻辑电路,不含记忆功能,所以要接入寄存器
2. 运算器的组成


3.快速进位链
a. 并行加法器

b.串行进位链
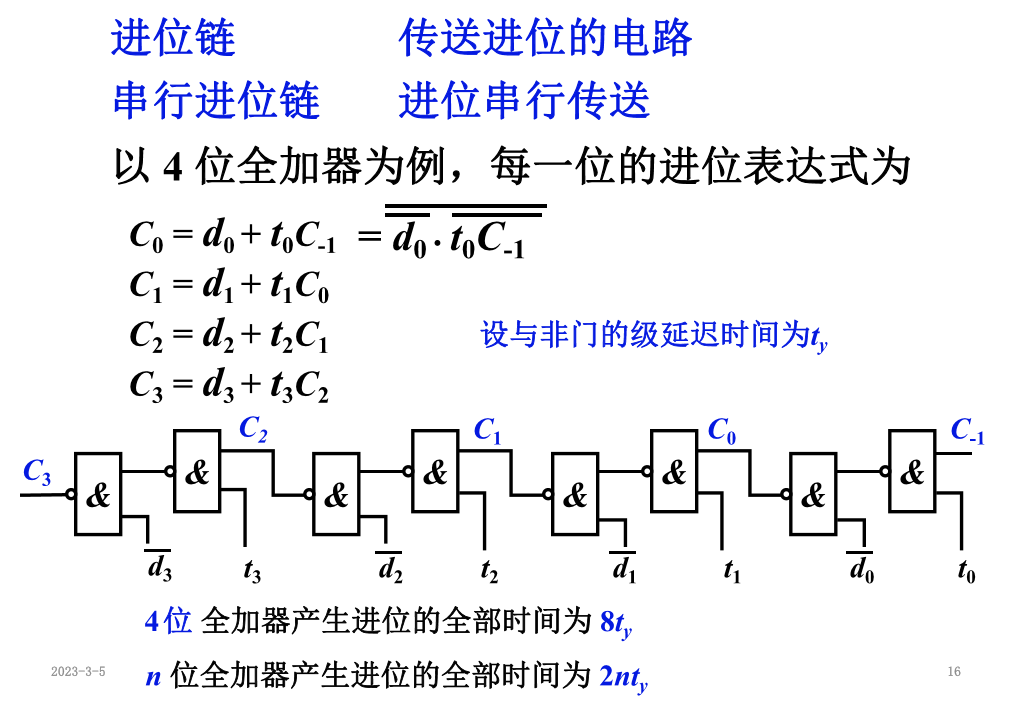
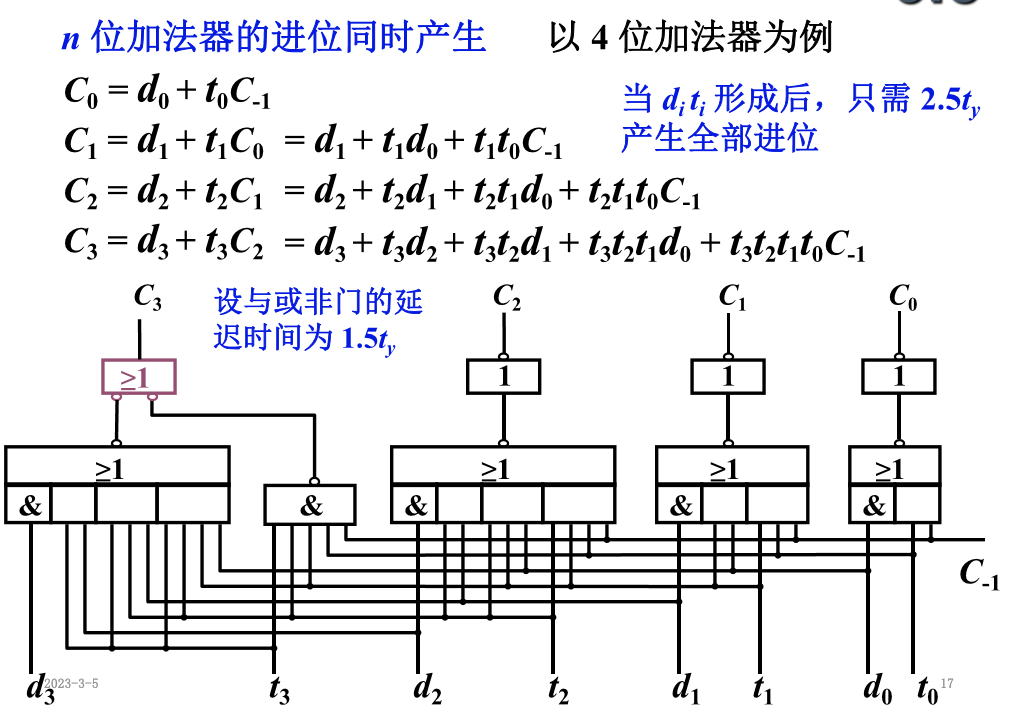
c.并行进位链
先行进位链:电路复杂
1)单重分组跳跃进位链
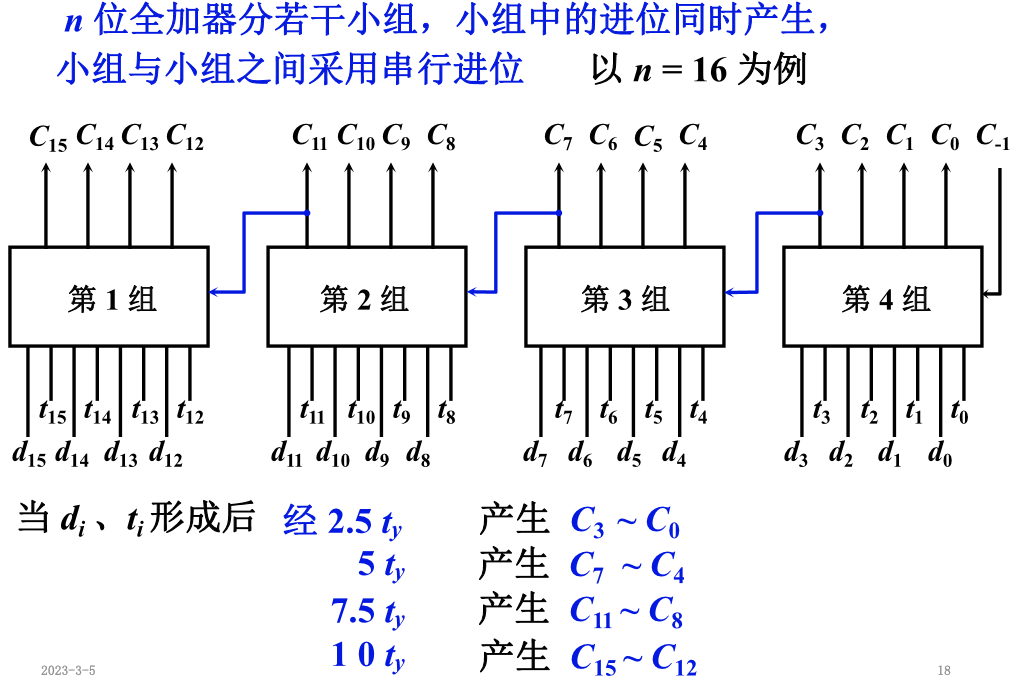
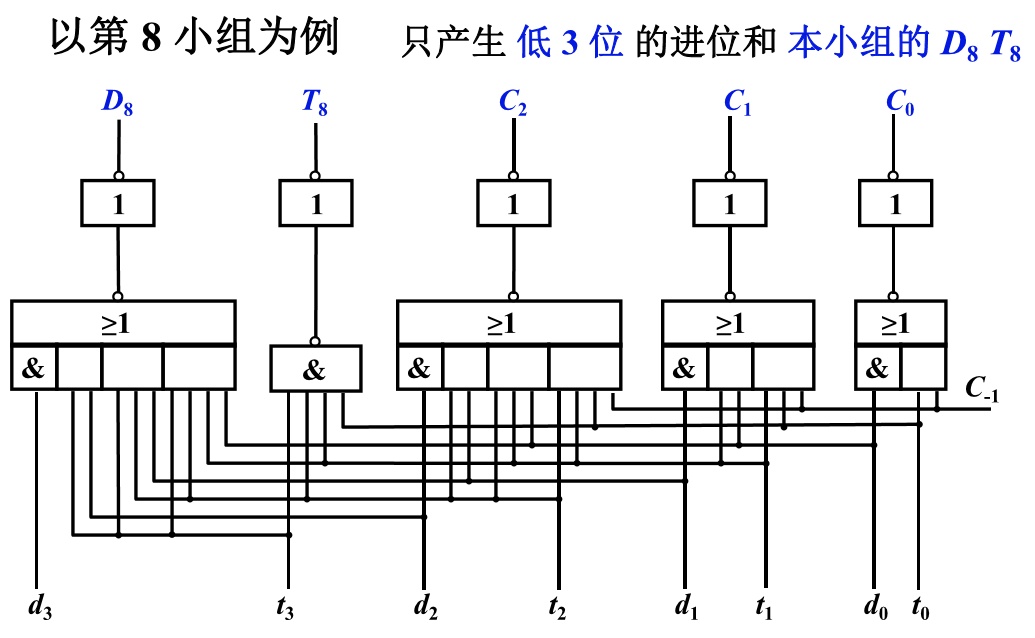
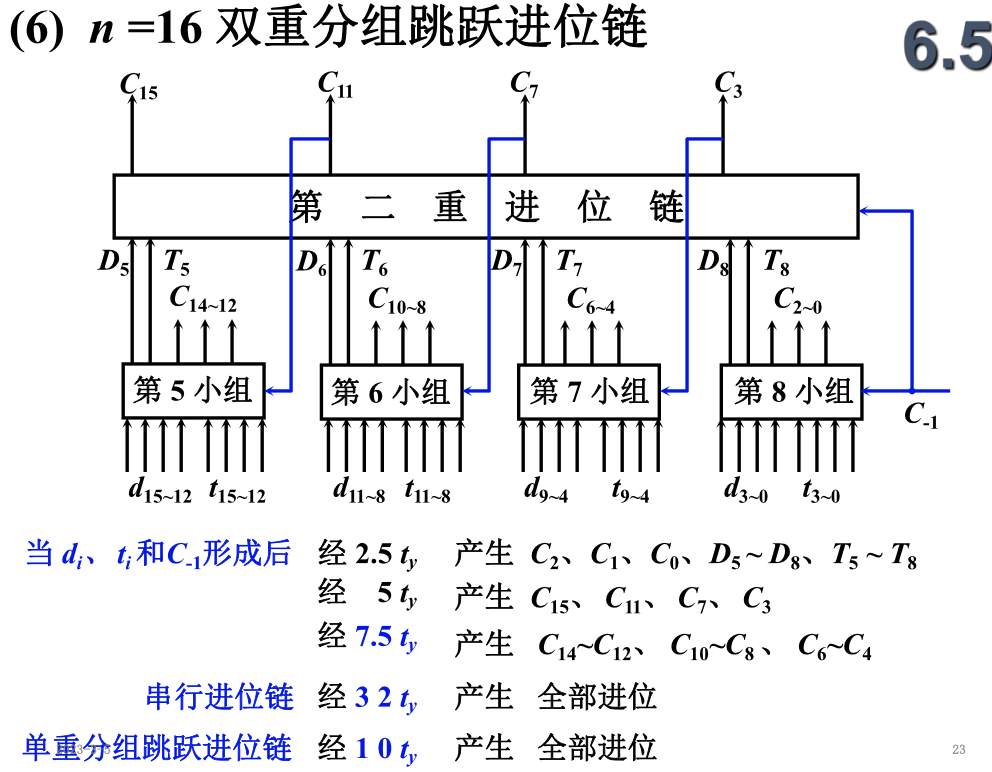
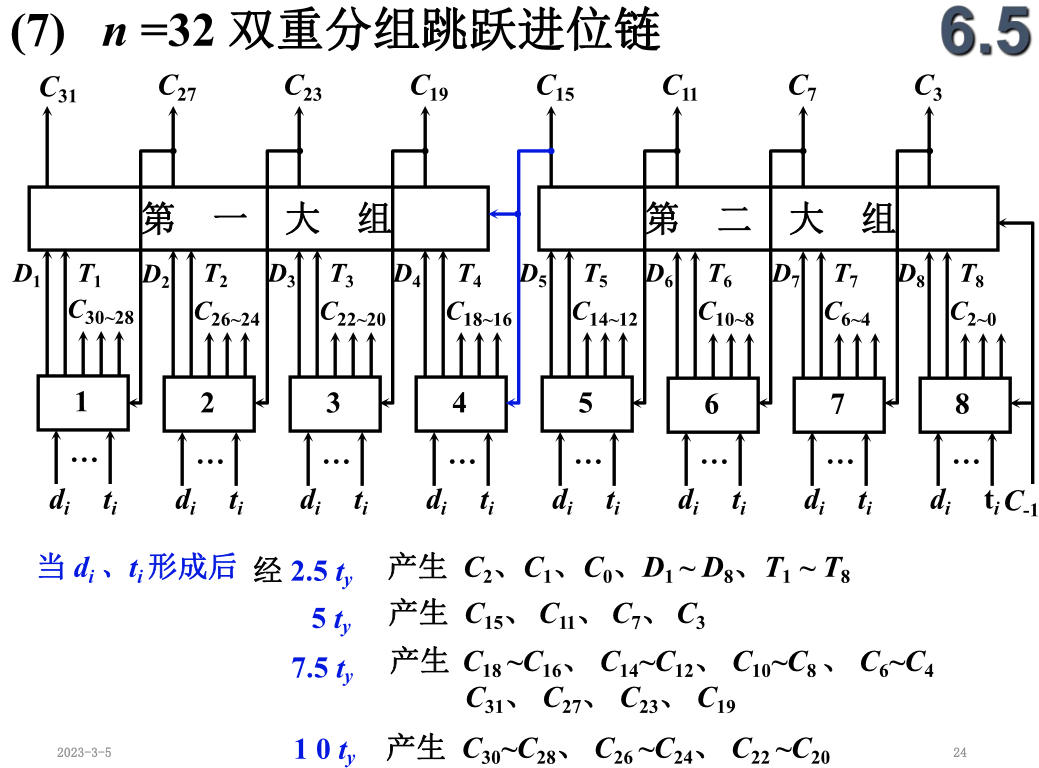
- 双重分组跳跃进位链
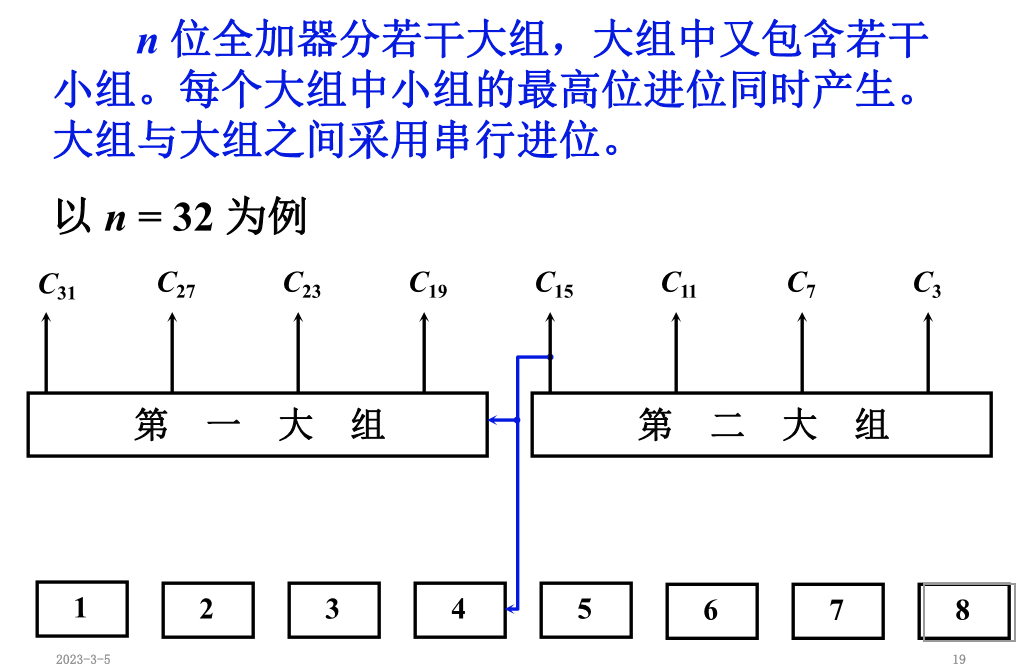
进位分析

大组进位线路

小组进位线路
4. 系统总线
总线概念
如果两两单独连接,则连接的网络十分庞大,而且难以扩展
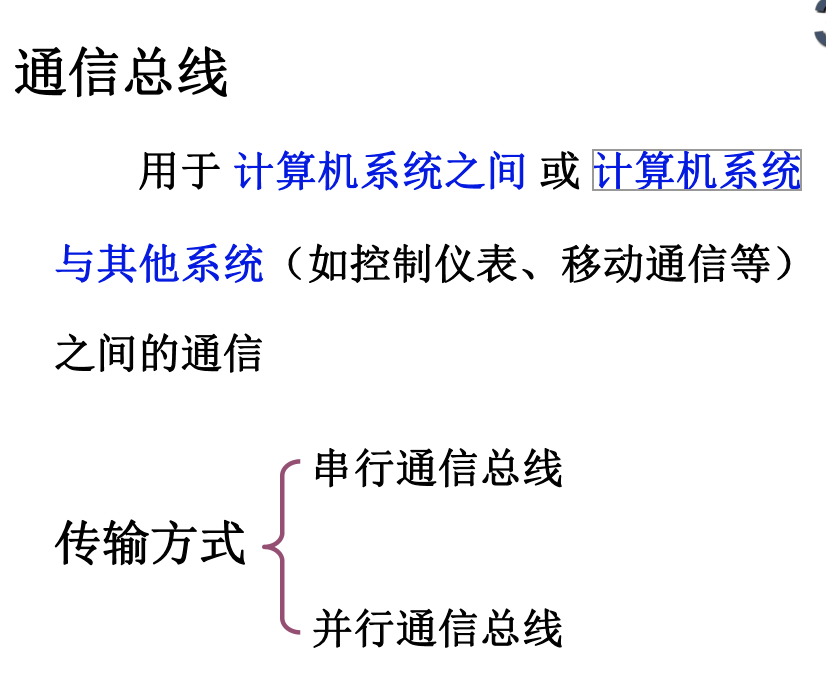
1.总线是各个部件共享的传输介质
总线上可以进行串行和并行两种传输方式
2.总线结构

这种结构可扩展性强,但是任意时刻只能进行两个部件之间的信息传递,严重影响效率
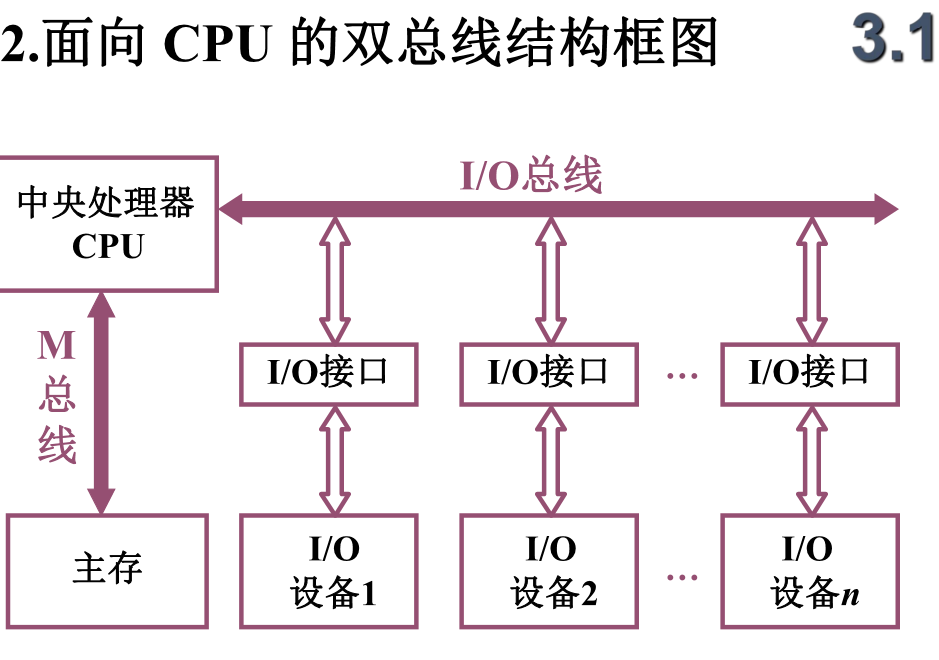
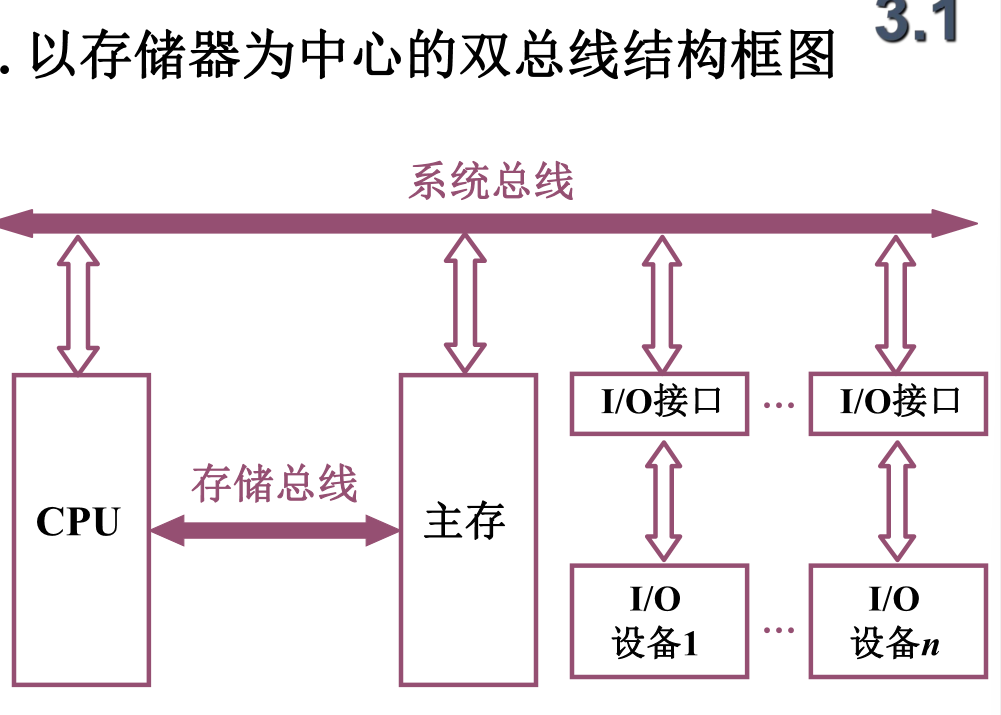
现代技术中 通常情况下这两条总线也很难同时工作
3.总线分类
- 片内总线: 芯片内部的总线
- 系统总线: 注意机器字长和存储字长的概念

4.总线特性及性能指标
- 总线的物理实现

总线是印刷在主板上的,图中cpu插板等都是在主线上的接口
- 总线的特性
a. 机械特性:尺寸、形状、管脚数及排列顺序
b. 电气特性: 传输方向 和有效的 电平范围
c. 功能特性: 每根传输线的 功能(地址、数据、控制)
d. 时间特性: 信号的时序关系
- 总线的性能指标
总线宽度:数据线的根数
标准传输率: 每秒传输的最大字节数(MBps)
时钟同步/异步: 同步、不同步
总线复用:地址线与数据线复用
信号线数:地址线、数据线和控制线的总和
总线控制方式:突发、自动、仲裁、逻辑、计数
其他指标:负载能力
- 总线标准

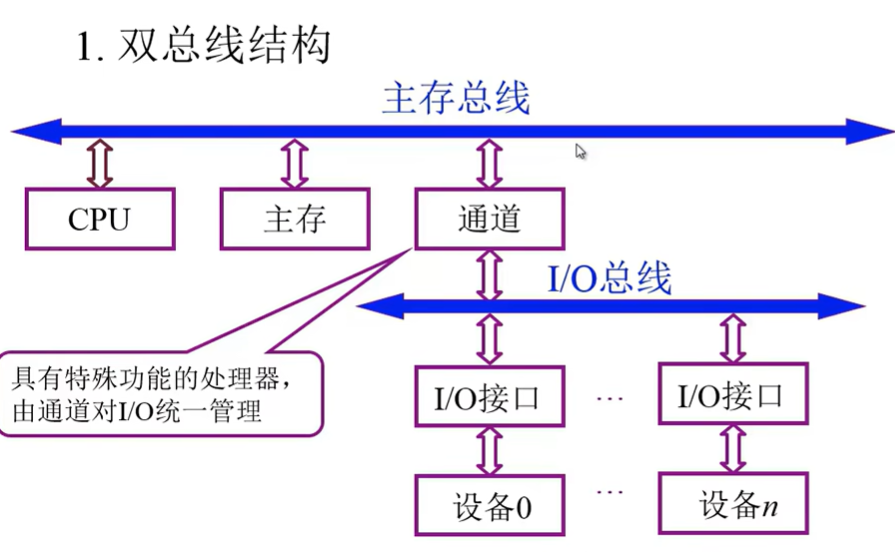
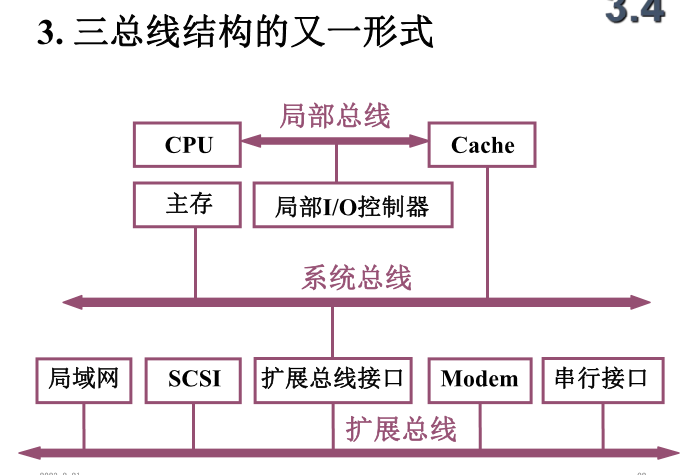
5.多总线结构


6.总线控制
一、总线判优控制
主设备(模块) 对总线有 控制权
从设备 响应 从主设备发来的总线命令
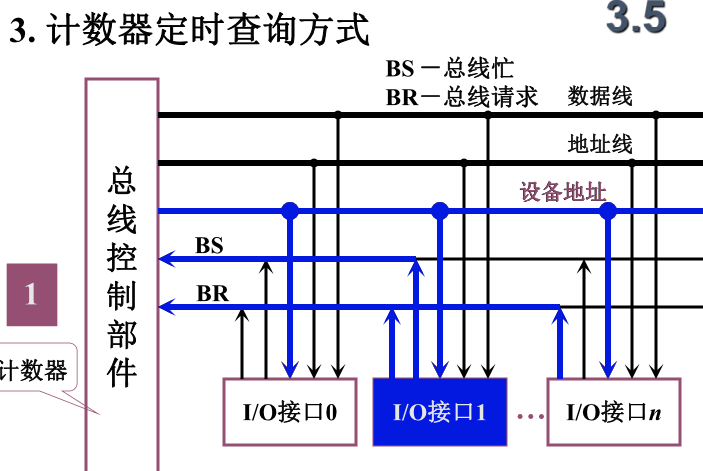
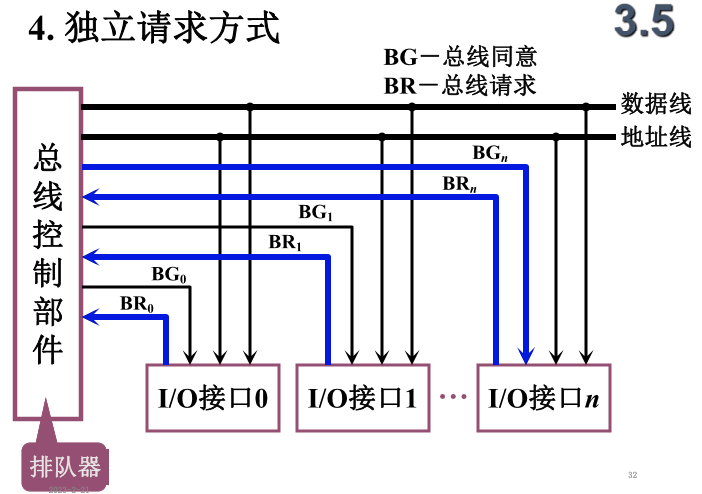
graph LR A[总线判优控制] --> B1[集中式] A --> B2[分布式] B1 --> c1[链式查询] B1 --> c2[计数器定时查询] B1 --> c3[独立请求方式]
2.查询方式


二、总线通信控制


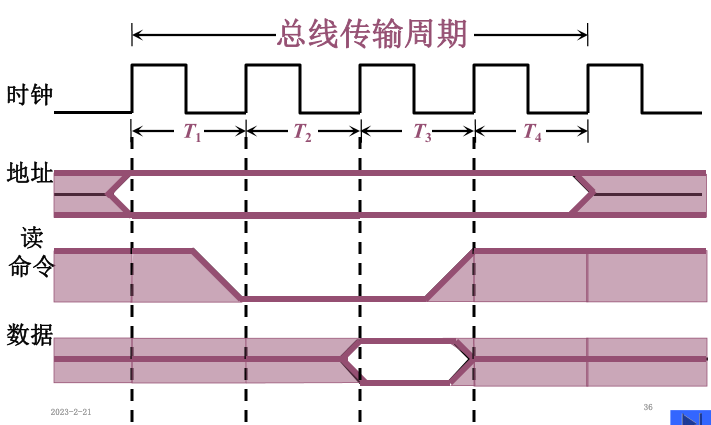
- 同步式数据输入
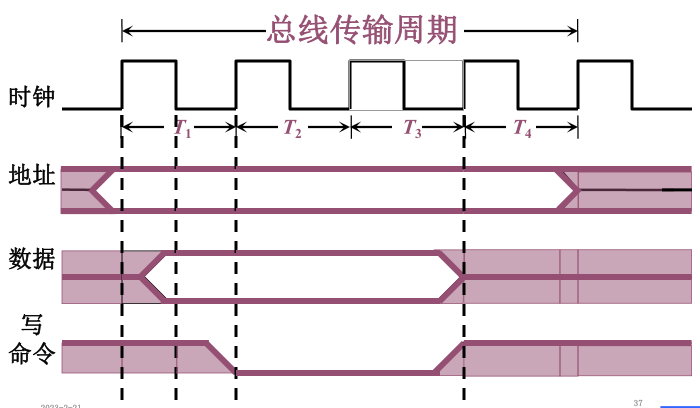
- 同步式数据输出
- 异步通信
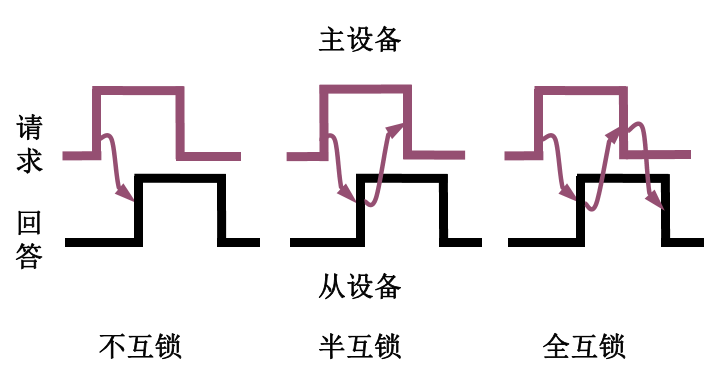
- 半同步通信

在同步通信之间插入WAIT信号
- 总结上述三种通信的共同点
一个总线传输周期(以输入数据为例)
- 主模块发地址、命令 占用总线
- 从模块准备数据 不占用总线总线空闲
- 从模块向主模块发数据 占用总线

分离式通信特点
- 各模块有权申请占用总线
- 采用同步方式通信,不等对方回答
- 各模块准备数据时,不占用总线
- 总线被占用时,无空闲
- 充分提高了总线的有效占用
5.存储器
5.1存储器的分类
按在计算机中的作用对存储器分类:
主存储器,简称主存。CPU可以直接随机地对其进行访问,也可以和高速缓存器及辅助存储器交换数据。
辅助存储器,简称辅存,不能与CPU直接相连,用来存放当前暂时不用的程序和数据
高速缓冲存储器, 位于主存和CPU之间,用来存放正在执行的程序段和数据,作为cpu和主存之间的缓冲
Flash Memory:可作为主存和辅存之间的临时存储器,也可以单独作为高性能存储器,为半导体元件,如U盘
按存储介质分类:
磁表面存储器(磁盘,磁带),磁心存储器半导体存储器(MOS型存储器,双极存储器)和光存储器(光盘)。
按存取方式分类:
随机存储器(RAM)。存储器的任何一个存储单元的内容都可以随机存取,而且存取时间与存取单元的物理位置无关,主要用作主存或高速缓冲存储器。
只读存储器(ROM)。存储器的内容只能随机读出而不能写入。即使断电,内容也不会丢失。
串行访问存储器。对存储单元进行读/写操作时,需按其物理位置的先后顺序寻址,包括顺序存取存储器(如磁带)与直接存取存储器(如磁盘)。
按信息的可保存性分类:
断电后,存储信息即消失的存储器,称为易失性存储器,如RAM。断电后信息仍然保持的存储器,称为非易失性存储器,如ROM,磁表面存储器和光存储器。若某个存储单元所存储的信息被读出时,原存储信息被破坏,则称为破坏性读出;若读出时,被读单元原存储信息不被破坏,则称为非破坏性读出。具有破坏性读出性能的存储器,每次读出操作后,必须紧接一个再生的操作,以便恢复被破坏的信息。

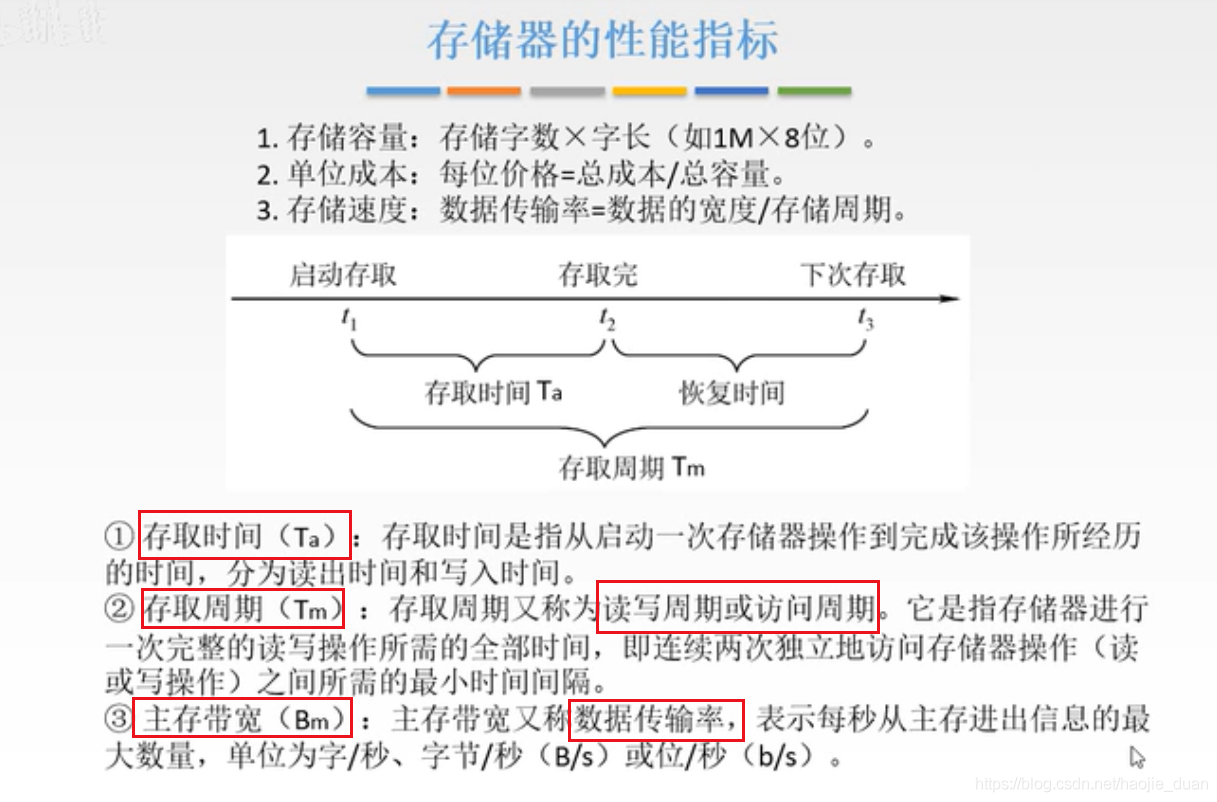
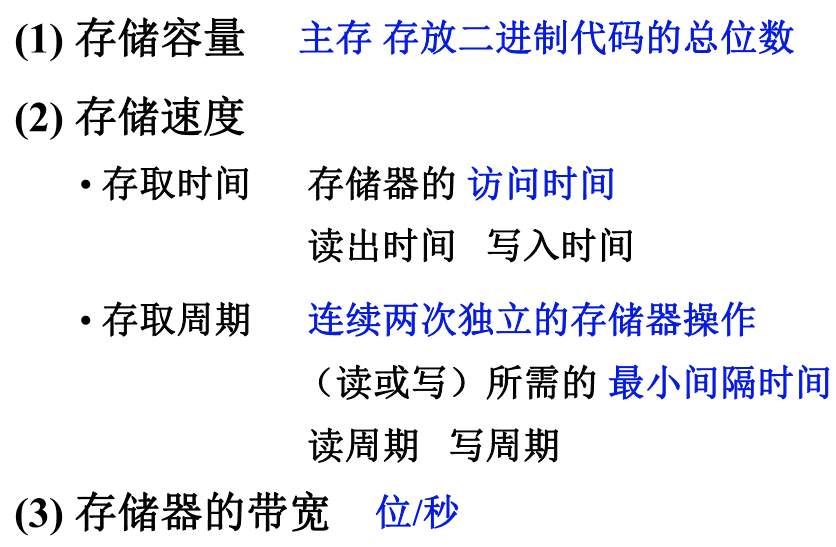
5.2存储器的性能指标
5.3存储器的层次结构
1.三个主要特征的关系

2.缓存一主存层次和主存一辅存层次

cpu提升速度远快于主存,所以在二者之间加了一个缓存
cpu可以通过直接访问缓存从而访问主存的信息
主存和缓存之间通过硬件直接设计连接到一起,不需要机器语言程序员考虑
而主存和辅存之间则软硬件结合
5.4主存
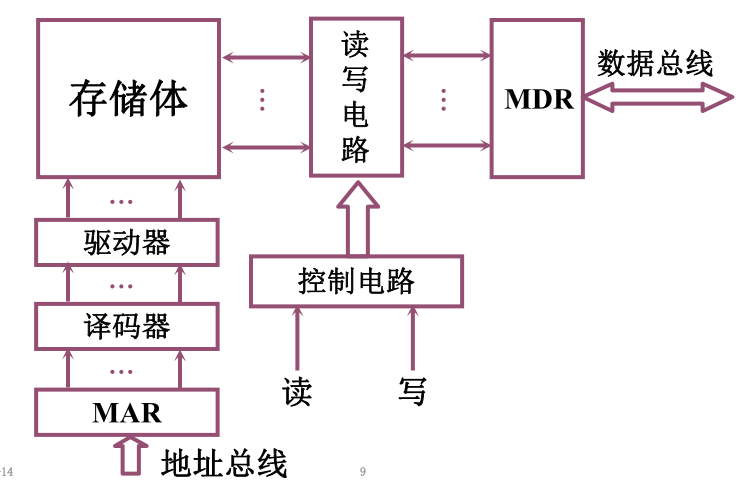
1.主存的基本组成
2.主存和cpu的关系

3.主存中存储单元地址的分配

4.主存的技术指标
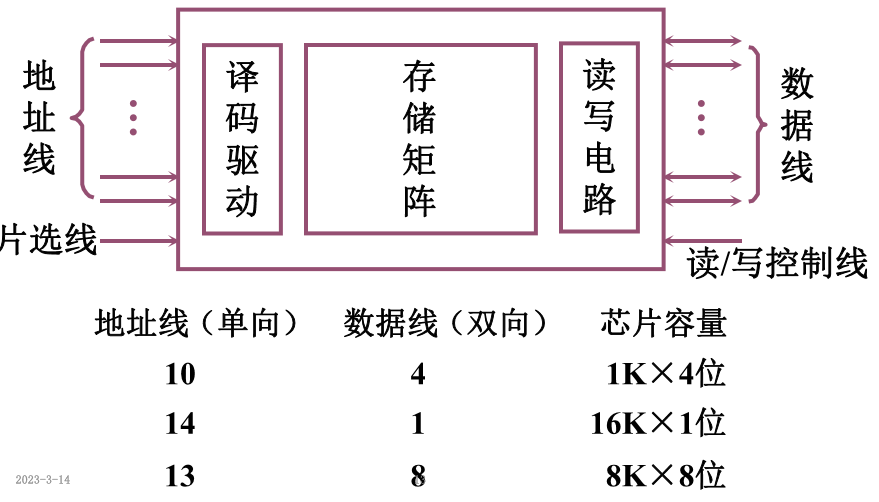
5.5半导体存储芯片
1.半导体存储芯片的基本结构

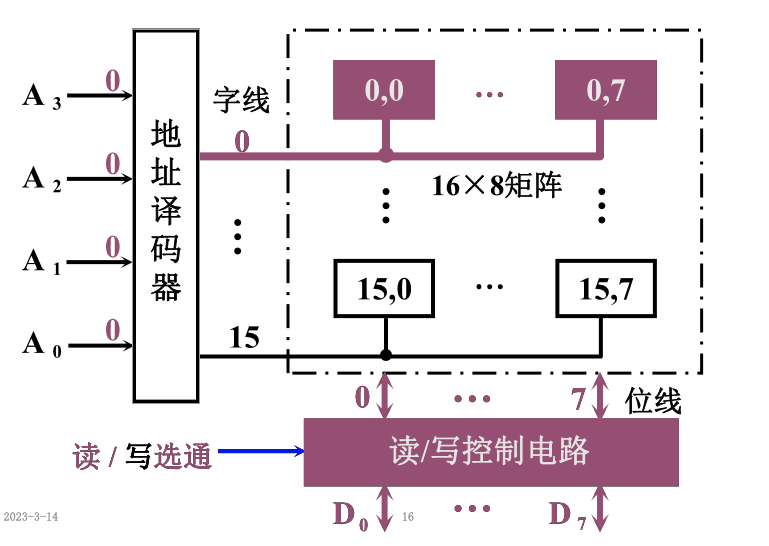
2.半导体芯片译码驱动法
1.线选法
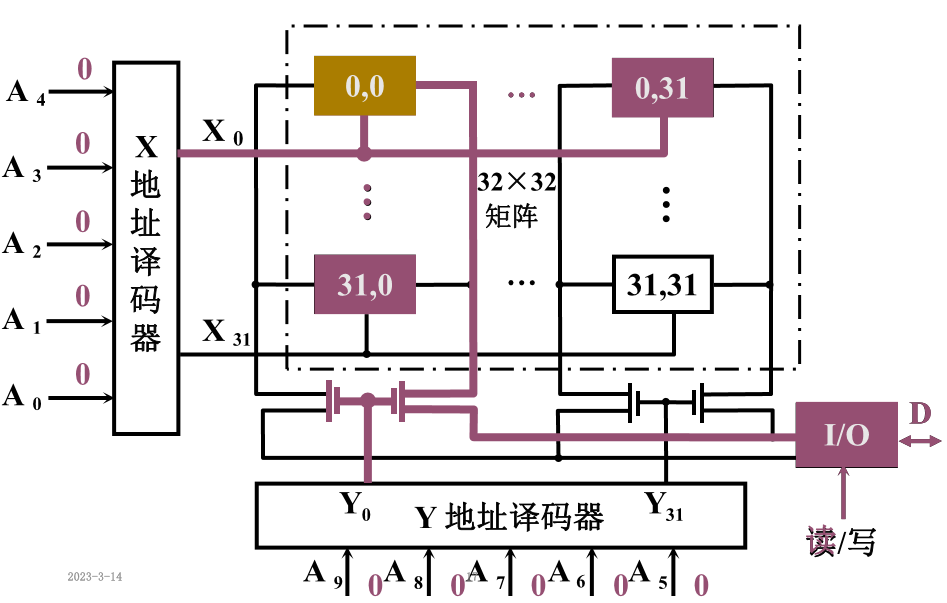
2.重合法
3.随机存取存储器(RAM)
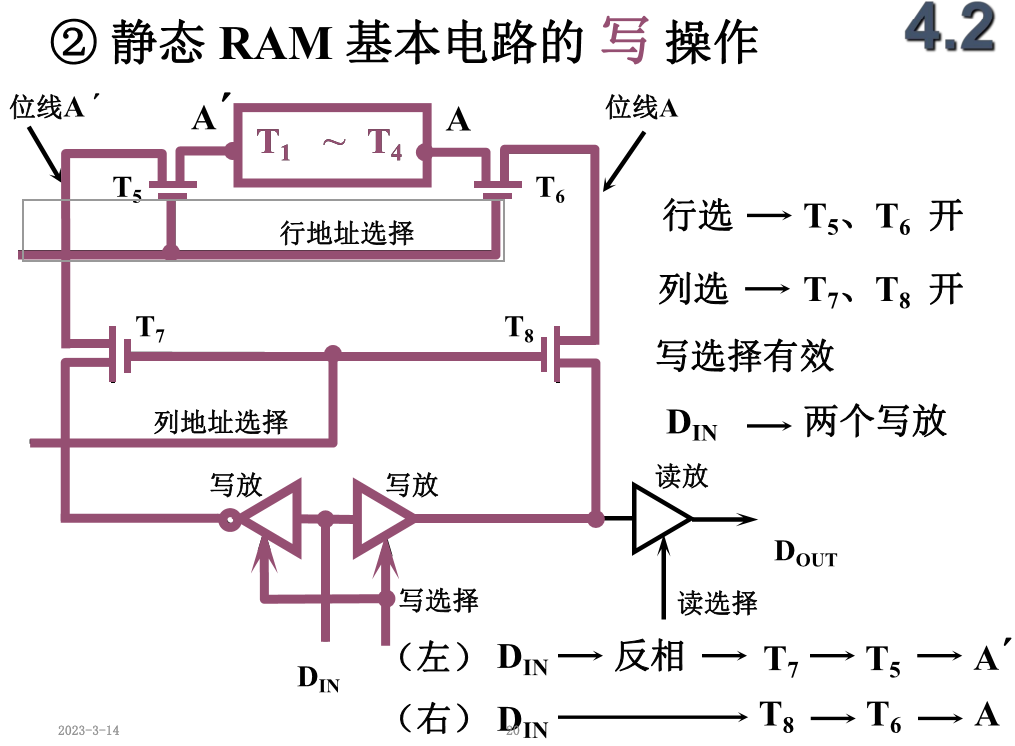
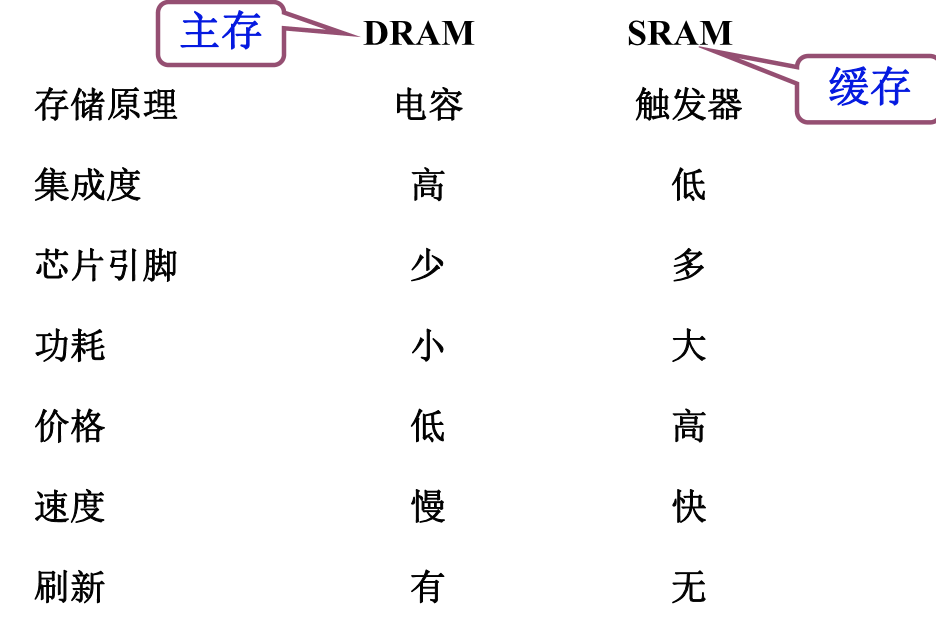
1.静态RAM(SRAM)
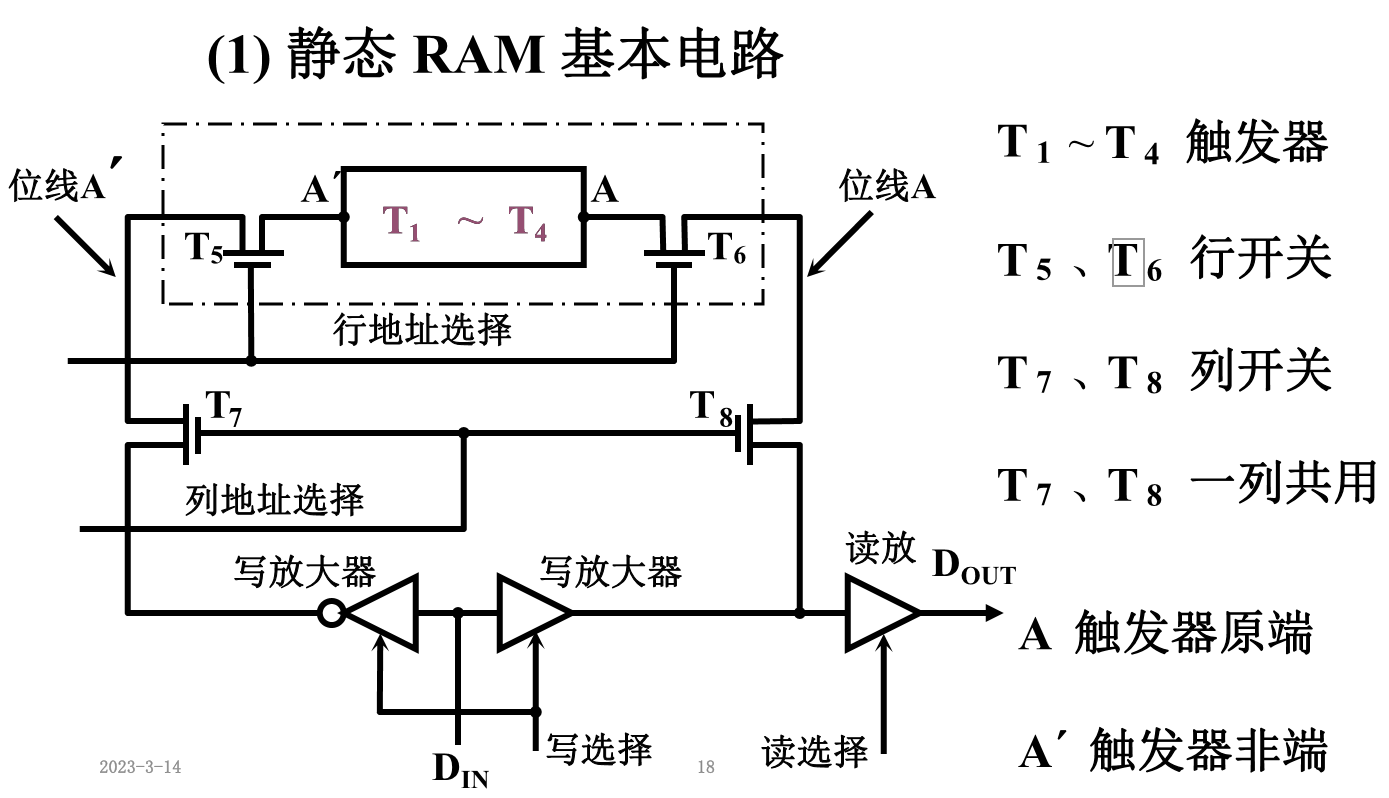
读写操作

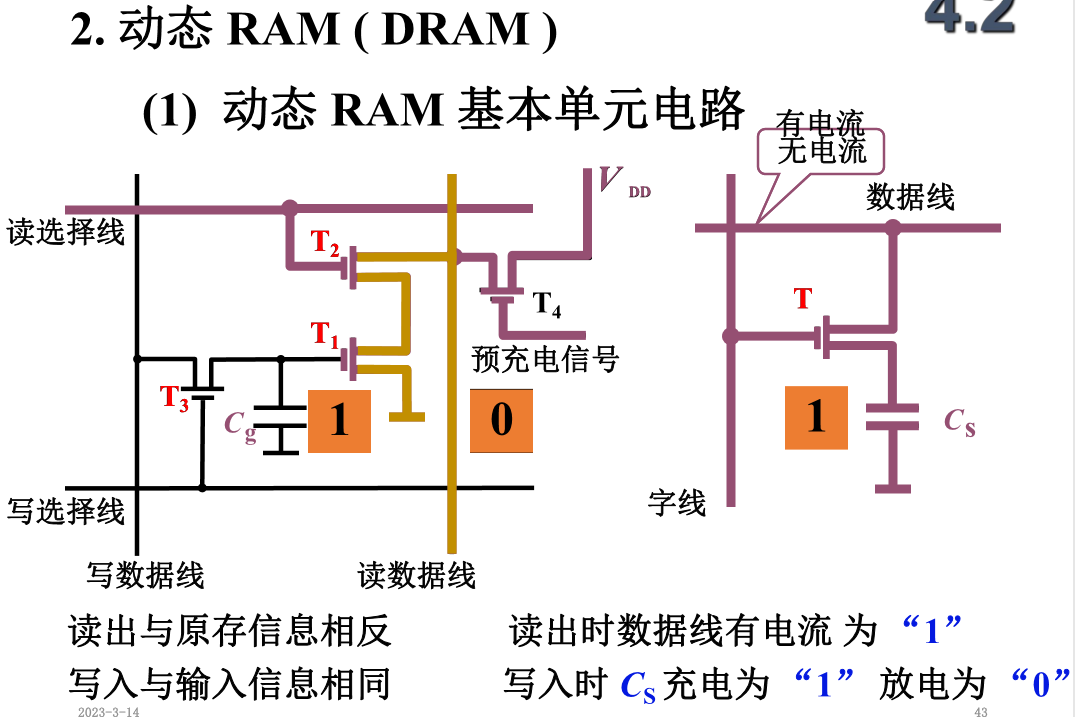
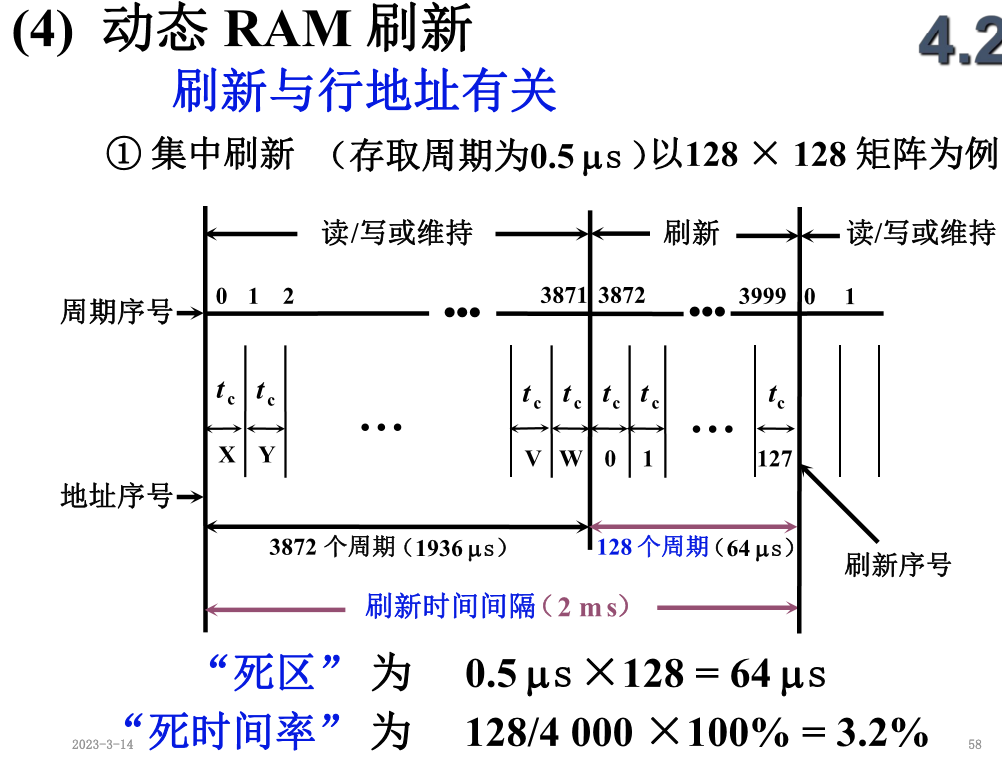
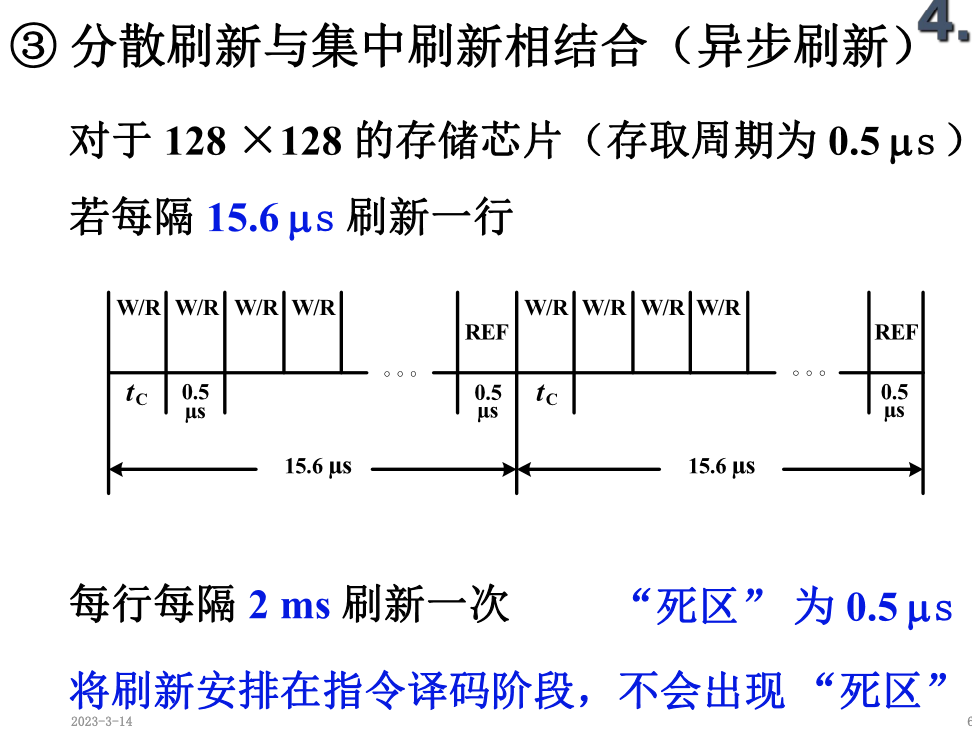
2.动态RAM(DRAM)


3.DRAM和SRAM比较
4.只读存储器(ROM)


5.总结

